9. Globální polohovací a navigační satelitní systémy
Globální polohovací a navigační satelitní systémy (GNSS) jsou družicové radiové systémy, které slouží ke stanovení geografické pozice a navigování uživatelova přijímače kdekoliv na světě. V současné době jsou v činnosti dva systémy a to americký GPS (Global Positioning System) a ruský GLONASS (Globalnaja Navigacionnaja Sputnikovaja Sistěma). Do roku 2004 má být v plném provozu evropský systém EGNOS jako předchůdce globálního polohovacího a navigačního satelitového systému GALILEO, který má být uveden do provozu v roce 2008.
9.1 Vývoj globálních polohovacích a navigačních systémů
Radiové určování polohy a navigace se začaly používat už mezi prvou a druhou světovou válkou v minulém století. V roce 1940 byl uveden do provozu systém Loran. Po druhé světové válce byla řešena otázka určování absolutní polohy s požadovanou přesností celou řadou projektů. Do používání byly zavedeny další pozemní radiomajáky (Decca, Omega). Od počátku šedesátých let minulého století rozvíjely americké vzdušné síly a námořnictvo satelitovou navigaci. Prvý byl dopplerovský systém Transit se šesti satelity, který byl původně určen pro potřeby ponorkového loďstva a později pro veškerou námořní navigaci. Od roku 1973 bylo velitelství amerického letectva odpovědno za sloučení pokusných programů Timation a 621B do programu NAVSTAR-GPS. Práce na tomto programu byly rozděleny do tří fází. Prvá fáze probíhala v letech 1973-1979 a byla zaměřena na ověření systému. V rámci vývoje bylo vypuštěno 11 družic bloku I a probíhaly práce na trojrozměrné navigaci většinou na testovacím polygonu v Arizoně (Yuma Proving Ground). Ve druhé fázi v letech 1979-1985 se budovala řídící střediska, probíhal vývoj družic bloku II a další testování na polygonu i na moři. Ve třetí fázi v letech 1985-1994 byly vyrobeny a vypuštěny všechny družice bloku II. Plného operačního stavu systému (24 družic) pro vojenské použití bylo dosaženo 3.3.1994.
Podobný radionavigační systém vyvíjely vojenské síly bývalého SSSR pod řízením vlády. Koncem šedesátých let byl uveden do provozu dopplerovský navigační systém Cyklon a později další a to vojenský systém Parus a civilní systém Cikada. Všechny tyto systémy měly obdobné nevýhody jako americký Transit (pouze dvourozměrné souřadnice a menší přesnost). V sedmdesátých letech byly zahájeny práce na globálním satelitovém navigačním systému GLONASS, který je v podstatě analogický americkému systému GPS.
Technický pokrok kosmické technologie, mikroelektroniky a počítačových technologií umožnil realizovat globální navigační systém pro všeobecné použití. Dramatický pokles cen GPS přijímačů a uvolnění původně vojenského systému pro civilní využití vedlo k rychlému rozšíření do všech sfér lidské činnosti.
9.2 Uspořádání satelitového polohovacího a navigačního systému
Globální satelitový polohovací a navigační systém se skládá ze tří základních segmentů (obr. 9.1), kterými jsou:
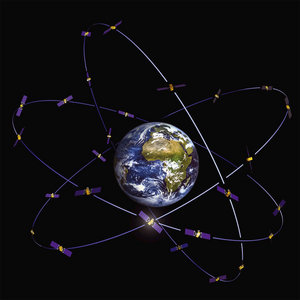
- Kosmický segment - soustava družic obíhajících kolem Země tak, aby se vždy alespoň čtyři z nich nacházely minimálně 15° nad obzorem (obr. 9.2). Družice vysílají radiové vlny odvozené ze základní frekvence generované velmi přesnými atomovými hodinami, které nesou informace potřebné pro stanovení polohy.
Obr. 9.1: Prvky satelitního navigačního systému
Obr. 9.2: Satelit systému GPS NAVSTAR 2f
-
Řídící segment - skládá se z hlavní kontrolní stanice a monitorovacích stanic umístěných kolem rovníku. Segment zajišťuje, že dráhy satelitů a chod hodin je v přijatelných mezích. Stanice umístěné kolem rovníku, které kontrolují a řídí družice, jsou vybaveny vysílacími anténami.
Zpráva vysílaná řídícím segmentem obsahuje funkci určující dráhu každého satelitu a předpověď dráhy na následujících 24 hodin. Obsahuje údaje o kalibraci a synchronizaci družicových hodin.
Každý satelit vysílá vlastní signál. Data jsou uspořádána do určitého formátu, který je definován přenosovým protokolem. U GPS jsou rozdělena do rámců o 1500 bitech. Každý rámec se dále dělí do 5 polí po 300 bitech o 10 slovech o 30 bitech. Obsah rámce uvádí obr. 9.3.
Obr. 9.3: Formát nagigačních dat GPS (upraveno podle Dany, 2000)
-
Pozemní segment - přijímače satelitových navigačních signálů, které lze podle základního provedení rozdělit na jednokanálové sekvenční, multiplexové a vícekanálové. Jednokanálový sekvenční přijímač postupně přijímá signály a plně zpracovává data z každé družice (jde o nejstarší a nejlevnější kategorii přijímačů). Multiplexový přijímač zrychluje zpracování tím, že v době příjmu signálu z následující družice jsou zpracovávána dekódovaná data od předchozí. Vícekanálový přijímač má 5 až 10 samostatných kanálů, které umožňují současný příjem signálů a zpracování dat z více družic. Tím je značně urychleno určení polohy a zvýšena přesnost.
Přijímače se také liší anténou. Plochá anténa je založena na principu technologie mikropásků. Na podkladové kruhové nebo čtvercové ploše je vytvořeno mnoho malých vzájemně propojených směrových dipólů. Tyto talířové antény se vyznačují malými rozměry a nízkou hmotností a proto se používají nejvíce u ručních přenosných přijímačů. Šroubovicová anténa má tvar doutníku, kdy na nosné desce je spirálovitě navinut vodič. Má větší zisk, ale i větší hmotnost.
Přijímače se vyrábějí v několika provedeních: jako kompaktní přístroje ke stabilní montáži s oddělenou anténou, jako desky určené pro zabudování do osobních počítačů nebo do řídících a zobrazovacích jednotek či ruční přenosné přístroje s pevnou nebo oddělitelnou anténou. Většina přístrojů je vyrobena v otřesu a vodovzdorném provedení (zpravidla mimo boxu s napájecími bateriemi).

Obr. 9.4: Příklady přijímačů: A - Casio GPS Watch 2240; B - Garmin GPS 76; C – Garmin Talking Street Pilot III GPS
9.3 Princip systému
Systém je založen na stanovení vzdálenosti mezi vysílačem na satelitu a přijímačem na základě měření časového intervalu mezi vysláním a přijetím signálu (obr. 9.5). Do vysílaného signálu jsou vloženy informace, ze kterého satelitu a kdy byl signál vyslán. Uvedené přijímané informace jsou zpracovávány v mikropočítači přijímače. V jeho paměti jsou uložena data o dráze a pohybu všech družic daného systému (tzv. almanac), která jsou minimálně každých dvanáct hodin zpřesňována pomocí korekcí (efemerid) stanovených na základě měření na pozemních monitorovacích stanicích.
Obr. 9.5: Princip stanovení polohy
Probíhající výpočty při každé komunikaci přijímače se satelitem lze zjednodušeně popsat vztahem
Určení zjišťované polohy je založeno na principu protínání. Známe-li vzdálenosti ze tří bodů k přijímači, pak jeho poloha je určena protnutím odpovídajících třech imaginárních kulových ploch, v jejichž středu leží ve vypočtené vzdálenosti odpovídající satelit (obr. 9.6).

Obr. 9.6: Princip stanovení polohy změřením délek od tří bodů (Schenk 2003)
Družice tedy vysílají signály a uživatelský přijímač zjišťuje čas jejich příjmu. Z doby tdi, která uplynula mezi vysláním a příjmem signálu (obr.9.7), přijímač automaticky vypočte vzdálenost di k satelitům. Z nich a z polohy satelitů v daném okamžiku je určena poloha uživatele. Polohu satelitů zjistí z vysílaných parametrů - efemerid.
Obr. 9.7: Korelace signálu satelitu a příjmače
Stanovení polohy by bylo jednoduché, kdyby byla synchronní časové základny (tj. hodiny) systému a uživatele. Časová základna uživatelského přijímače je posunuta o neznámý časový interval Δt, který lze přepočítat na vzdálenost
Tab. 9.1: Vybrané referenční elipsoidy
| název | poloosa (m) | 1/zploštění |
| Airy 1830 | 6377563.396 | 299.3249646 |
| Clarke 1880 | 6378249.145 | 293.465 |
| Krassovsky 1940 | 6378245.0 | 298.3 |
| Fischer 1960 | 6378166.0 | 298.3 |
| GRS 1975 | 6378140.0 | 298.257 |
| WGS 84 | 6378137.0 | 298.257223563 |
Hledané souřadnice se určují na geometrickém elipsoidu jako modelu geoidu. Americký systém používá elipsoid WGS 84, ruský systém elipsoid PZ-90. Příklady referenčních elipsoidů uvádí tab. 9.1.
9.4 Metody stanovení polohy
Metody stanovení polohy pomocí satelitových navigačních systémů lze podle požadované přesnosti stanovení a typu přijímače rozdělit do tří skupin:
- Autonomní navigace s použitím jednoho přijímač. Přesnost v určení polohy lepší než 100 m pro civilní potřeby a 20m pro vojenské účely.
- Diferenciální navigace (DGPS) dává přesnost 0.5 až 5 m. Podstatou tohoto postupu je použití referenční stanice se známými přesně určenými souřadnicemi. Tím lze stanovit opravy měřených zdánlivých vzdáleností. Tyto korekce jsou z referenční stanice vysílány rádiem pro přijímače na měřených bodech. Pro přenos korekcí se využívá síť stabilních radiomajáků u mořského pobřeží, nebo síť mobilních telefonů. Nevýhodou je omezené pokrytí území v okruhu do 400 km od referenční stanice, což částečně odstraňuje systém WADGPS (Wide Area DGPS).
- Relativní fázová měření se používají v geodézii, při kontrole pohybu strojů apod. Dosahuje přesnosti 0.5 až 20 mm. Jsou založena na využití fáze nosné vlny L1 s délkou 19.4 cm. Podle počtu vlnových délek mezi přijímačem a satelitem lze velmi přesně stanovit vzdálenost.
9.5 Zdroje chyb měření
Podobně jako v jiných navigačních systémech dosahují i systémy satelitové navigace určitou míru přesnosti stanovení polohy a rychlosti. To je důsledkem vlivů jistých chyb systému, které sestávají z chyb měření vzdálenosti (chyba pseudovzdálenosti) násobené hodnotou geometrické odchylky od přesnosti (GDOP – Geometric Dilution Of Presicion). Informace o těchto chybách jsou stále znázorňovány na displeji přijímače.
Přesnost radionavigačních systémů je statistická míra chyby systému. Je obvykle charakterizována jako:
- predikovatelná - přesnost radionavigačního určení vzhledem k zákresu v mapě (obojí určené na stejném geodetickém modelu Země);
- opakovatelná - přesnost, se kterou se uživatel může vrátit na dříve určenou polohu stejným navigačním systémem;
- relativní - přesnost, se kterou uživatel může měřit polohu vzhledem k poloze jiného uživatele (se stejným navigačním systémem ve stejném čase).
Chyba měření vzdálenosti má statistický charakter. Udávané hodnoty přesnosti stanovení polohy jsou tedy statistické odhady s danou pravděpodobností, obvykle pro 50 % (CEP – úhel v němž je 50 % pravděpodobnost lokalizace) či 67 % (DRMS) interval.
Na chybách, které se uplatňují při určování polohy a satelitové navigaci, se podílí řada příčin, které lze rozdělit do šesti skupin:
- efemeridy - chyby v přenášené lokalizaci satelitů;
- satelitové hodiny - chyby v přenášených údajích včetně úmyslného zkreslení SA;
- ionosféra - chyby v korekcích pseudovzdálenosti zapříčiněné vlivy ionosféry;
- troposféra - chyby v korekcích pseudovzdálenosti dané vlivy troposféry;
- multipath - chyby vzniklé odraženými signály;
- přijímač - chyby měření přijímačem, dané termálním šumem, přesností softwaru a mezikanálovými odchylkami.
Chyba efemerid vzniká tím, že satelitová zpráva nepředává správnou pozici satelitu. Radiální složka této chyby je nejmenší, kdežto tangenciální a trasová chyba může být větší. Tato chyba má tendenci vzrůstat s časem od poslední opravy, nicméně jde o pomalé změny.
Chyba satelitových hodin ovlivňuje satelitové signály (C/A a P kódy). Vznikající chyby jsou nezávislé na postavení satelitů. Hlavním zdrojem zdánlivé chyby hodin je záměrné zkreslení (SA), které ale bylo rozhodnutím prezidenta Clintona z 2. května 2000 odstraněno.
Ionosférické a troposférické chyby jsou způsobeny změnami rychlosti šíření satelity vysílaných elektromagnetických vln při průchodu atmosférou (standardní rychlost 300 000 km platí pouze ve vakuu). Snížení rychlosti radiových vln při průchodu ionosférou je úměrné množství volných elektronů. V prvém přiblížení je úměrné inverznímu kvadrátu frekvence nosné vlny. Ionosféra obvykle chová mimo rovníkové a polární zóny stabilně a vzniklé zpoždění lze proto eliminovat několika postupy (např. vhodnými filtry při zpracování dat v přijímači). Další odchylky vznikají při průchodu radiových vln troposférou. Jde o vliv změn teploty, tlaku a vlhkosti vzduchu (obr. 9.8).
Obr. 9.8: Vliv atmosférických chyb
Chyba z vícenásobného příjmu signálu vzniká někdy vlivem vícenásobného příjmu signálu přes odrazné rovné plochy v blízkosti přijímače (např. budovy, jezera, nádrže apod.). Je označovaná jako multipath error (obr. 9.9). Opatření k minimalizaci této chyby je použití kombinace mezního úhlu antény a vhodné polohy antény. Většina novějších přijímačů tuto chybu eliminuje anténními filtračními technikami.
Obr. 9.9: Vícenásobný příjem signálu
Vyloučíme-li úmyslné zkreslení, pak je dominantní chyba u jednokanálových přijímačů způsobena vlivem ionosféry. U přijímačů dvou a vícekanálových se její rozměr podstatně snižuje.
Chyby vyvolané geometrií satelitů kolísají. Při světovém průměru 2.5 m mohou dosahovat při špatné geometrii 10 i více metrů. Typická normální přesnost (tj. na úrovni jedné standardní odchylky) kolísá u dobrých civilních přijímačů při vyloučení úmyslného zkreslení kolem 10 metrů horizontálně a 13 metrů vertikálně. Přehled chyb a jejich velikosti je uveden v tabulce 9.2.
Tab. 9.2: Chyby měření a jejich rozměr
| Zdroj chyby | Typické rozmezí |
| satelitové hodiny | 1 m |
| efemeridy | 1 m |
| selektivní dostupnost | 10 m |
| troposféra | 1 m |
| ionosféra | 10 m |
| pseudonáhodný šum | 1 m |
| šum přijímače | 1 m |
| multipath | 0.5 m |
| chyba RMS | 15 m |
| chyba x PDOP = 4 | 60 m |
Chyby přijímače zahrnují jednak chyby dané konstrukcí přijímače (jedno či více kanálové, typ použitých mikroprocesorů), jednak přesností aplikovaného softwaru. Lze říci, že přijímač může vykazovat systematickou chybu pod 0.5 m a chybu vyvolanou šumem pod 0.2 m; celková chyba se udává okolo 1 m.
Snížení přesnosti určení polohy (DOP – Dilution of Precision) je míra vlivu geometrického rozložení satelitů nad obzorem v okamžiku měření (obr. 9.10). Dosažitelná minimální hodnota se rovná jedné.
Obr. 9.10: Vliv rozložení a viditelnosti satelitů
Rozlišuje se několik typů snížení přesnosti a to HDOP (v horizontálním směru), VDOP (ve vertikálním směru), PDOP (v prostorové poloze) a GDOP (v poloze a čase – nejčastěji). Vedle uvedených chyb se mohou vyskytnout hrubé chyby v důsledku omylů uživatele, chyb softwaru a hardwaru atd., které mohou vést k chybám řádu stovek km.
9.6 Popis satelitních systémů
9.6.1 Satelitní navigační systém GPS (Global Positioning System)
známý i pod názvem NAVSTAR je dálkoměrný systém pro stanovení polohy a času na zemském povrchu a v přilehlém prostoru, který se skládá z kosmického, řídícího a uživatelského segmentu. Systém je schopen průběžně poskytovat signály, které po zpracování v přijímači určí prostorovou polohu a přesný čas. Tento radionavigační systém je provozován vzdušnými silami USA a řízen vládou USA prostřednictvím IGEB (Interagency GPS Executive Board). Je určen jak pro vojenské, tak civilní použití.
Obr. 9.11: Start nosné rakety Delta
Kosmický segment je tvořen 28 (z toho 4 záložními) cca 900 kg těžkými satelity na šesti oběžných drahách ve výšce cca 20200 km s inklinací 55 stupňů. Doba oběhu je přibližně 11 hodin 58 minut. To znamená, že vždy jsou dostupné 4 až 12 satelitů, v ČR běžně 7-8 satelitů. Pro určení polohy v prostoru a času je nutno přijímat signály minimálně ze 4 družic (obr. 9.12).
Obr. 9.12: Soustava 24 satelitů na šesti oběžných drahách systému PGS (Dana, 2000)
Každý satelit je vybaven čtyřmi velmi přesnými atomovými hodinami, které pracují s operační frekvencí 10.23 MHz. Z ní generované navigační signály se vysílají na kmitočtech 1575.42 MHz (frekvence L1) a 1227.6 MHz (frekvence L2). Frekvence L1 přenáší C/A kód (Coarse/Acquisition Code - hrubý/volný kód) s modulací 1.023 MHz a P kód (přesný kód) s modulací 10.23 MHz. Na frekvenci L2 je modulován pouze P-kód 10.23 MHz (obr. 9.13).
Obr. 9.13: Struktura družicového signálu
Až do roku 2001 byla přesnost určování polohy pomocí amerického systému GPS pro civilní použití úmyslně znepřesňována úpravou vysílaných signálů zpožďováním satelitových hodin a zkreslením efemerid (výběrový přístup - SA). Toto znehodnocení bylo možno překonat použitím referenčních systémů určování polohy.
Volně přístupný je pouze S/A kód. Přesnější P kód určený pro vojenské použití je proti zneužití zakódován do Y-kódu (tzv. Anti-Spoofing), který mohou využívat pouze přijímače armádních sil USA a jejich spojenců.
Řídící segment (obr. 9.14) sestává z hlavní řídící stanice (MCS) na letecké základně Falcon v Colorado Springs a pěti monitorovacích stanic, které jsou rozmístěny po celém světě (Falcon v Coloradu, Kwajalein Island v Jižním Pacifiku, atol Diego Garcia v Indickém oceánu, Ascension Island v Atlantiku a ostrov Hawaii).
Monitorovací stanice provádějí neustále sběr dat z družic (výška, pozice, rychlost, celkový stav) a předávají je do hlavní řídící stanice, ve které jsou vypočítávány přesné údaje o oběžných drahách a korekce času, které jsou třemi vysílacími stanicemi zpětně přenášeny do satelitů. Ty je pak vysílají do GPS přijímačů. Pozemní antény monitorují a sledují satelity od horizontu po horizont a přenášejí na ně korekční informace (obr. 9.15).
Obr. 9.14: Rozložení stanic řídícího a kontrolního segmentu systému GPS (Dana, 2000)
Uživatelský segment je tvořen pasivními GPS přijímači, které poskytují uživatelům údaje o poloze, rychlosti a čase. Tyto přijímače jsou vyráběny pro různá použití (civilní a vojenská) a v různém provedení velkým počtem výrobců.
Obr. 9.15: Antény pozemního kontrolního systému
9.6.2 Satelitní navigační systém GLONASS
je satelitový radionavigační systém, zajišťující pro uživatele stanovení prostorové polohy, rychlosti a času kdekoliv na povrchu Země a v přilehlém prostoru. Je řízen vládou Ruské federace prostřednictvím kosmických sil jako operátorem.
Kosmický segment systému je tvořen 24 satelity, které jsou rovnoměrně rozmístěny na třech orbitálních kruhových drahách 19100 km nad Zemí. Tyto dráhy jsou ukloněny pod úhlem 64.8°. Oblet trvá 11 hodin a 15 minut. Takovéto rozmístění zajišťuje, že vždy je alespoň 5 satelitů viditelných. Každý satelit vysílá radiový signál obsahující navigační zprávy (obr. 9.16).
Obr. 9.16: Družice systému GLONASS
Kontrolní komplex sestává z kontrolního centra v Krasnoznamensku v Moskevském regionu a několika sledovacích stanic rozmístěných po celém Rusku. Informace ze stanic jsou zpracovávány v kontrolním centru a časové a oběhové parametry jsou vysílány na satelity. Údaje jsou periodicky kalibrovány pomocí laserových měření. Velmi důležitá je synchronizace všech procesů, což zajišťuje centrální synchronizér, tj. velmi přesné vodíkové atomové hodiny v kontrolním centru s denní nestabilitou menší než 5×10-14. Časové stupnice cesiových hodin na satelitech jsou synchronizovány s etalonem v Mendělejevu.
Má dva typy navigačního signálu: navigační signál standardní přesnosti (SP) a velmi přesný navigační signál (HP). Polohovací a časové služby SP jsou určeny pro civilní uživatele a mají přesnost v horizontálním směru 57 - 70 m a ve vertikálním směru do 70 m, v rychlosti do 15 cm.s-1 a v čase do 1 µs, vše při 99.7 % pravděpodobnosti. Všechny tyto charakteristiky mohou být významně zpřesněny použitím diferenciální a speciálních metod navigace.
Uživatelský segment je podobně jako u systému GPS tvořen různými typy přijímačů, které poskytují uživatelům údaje o poloze, rychlosti a čase.
Tab. 9.3: Porovnání charakteristik systémů GPS a GLONASS
| GPS | GLONASS | ||
| Počet satelitů | 24 | 24 | |
| Nosná raketa | Delta 2-7925 | Proto K/DM-2 | |
| Startovací základna | Cape Canaveral, USA | Bajkonur, Kazachstan | |
| Počet orbitálních drah | 6 | 3 | |
| inklinace | 55° | 64.8° | |
| Výška dráhy | 20 180 m | 19 130 m | |
| Doba obletu | 11h 58m 00s | 11h 15m 40s | |
| Geometrický elipsoid | WGS-84 | PZ-90 | |
| almanach | délka | 120 bitů | 152 bitů |
| trvání | 2m 30s | 12m 30s | |
| Týden platnosti | Den platnosti | ||
| S/C identifikátor | Číslo kanálu | ||
| excentricita | excentricita | ||
| inklinace | inklinace | ||
| Čas almanachu | Čas rovníku | ||
| frekvence | L1 | 1575.42 MHz | 1602.0-1614.94 MHz |
| L2 | 60/77 L1 | 7/9 L1 | |
9.6.3 Satelitní navigační systém EGNOS
(European Geostationary Navigation Overlay Service – Evropská geostacionární vykrývací služba) je první satelitní systém v Evropě, který snižuje nepřesnost určení polohy na možné minimum bez nutnosti používat speciální vojenské přístroje nebo přijímat diferenciální korekce.
Je tvořen třemi geostacionárními satelity a sítí pozemních stanic, a celý tento komplex slouží k získání a přenosu informace o spolehlivosti a přesnosti signálů odesílaných ze sítě GPS nebo GLONASS. Zjednodušeně řečeno, EGNOS poskytuje uživatelům v Evropě a přilehlém okolí určení polohy v intervalu do 5 metrů oproti běžným 20 metrům.
EGNOS je projekt společnosti ESA (European Space Agency), EC (European Commission a Eurocontrol a Evropské organizace pro bezpečnost letecké navigace. Jeho spuštění bylo původně plánováno na rok 2004. V současné době je stále v testovacím provozu.
9.6.4 Satelitní navigační systém GALILEO
Galileo je globální družicový navigační systém, který by se měl stát alternativou k americkému, armádou kontrolovanému, systému GPS a ruskému systému GLONASS. Jeho výstavbu realizuje Evropská unie reprezentovaná Evropskou komisí (EC) a Evropskou kosmickou agenturou (ESA). EC je odpovědná za řešení politických otázek souvisejících se stavbou systému a za požadavky vyplývající z jednání na vysoké úrovni. Komise také zadala vypracování studií o celkové architektuře, ekonomické prospěšnosti a uživatelích systému. ESA odpovídá za vývoj a zprovoznění družicové části systému a navazujícího pozemního zařízení. Systém Galileo by měl být provozuschopný od roku 2010.
Systém bude tvořen 30 družicemi, obíhajícími ve třech rovinách, navzájem posunutých o 60 stupňů, po kruhových drahách ve výšce 23 616 kilometrů nad povrchem Země. Každá z rovin dráhy bude svírat s rovinou rovníku úhel 56 stupňů, což umožní využívat navigační systém bez potíží až do míst ležících na 75 stupni zeměpisné šířky. Velký počet družic, z nichž tři budou záložní, zajistí spolehlivou funkci systému i když některá družice přestane správně pracovat (obr. 9.17). Galileo umožní každému držiteli přijímače signálu určit jeho aktuální polohu s přesností lepší než jeden metr.
Obr. 9.17: Družice systému Galileo na třech oběžných drahách (ESA)
Galileo by měl poskytovat:
- Vyšší přesnost (ve srovnání se stávajícími navigačními systémy) dostupnou všem uživatelům
- Větší pokrytí signálem družic obáhajících na vyšších oběžných drahách. Z této výhody bude těžit například Skandinávie, jakožto nejsevernější evropská oblast.
Galileo by se měl stát spolehlivým, veřejnosti celosvětově dostupným satelitním navigačním systémem, využitelným současně evropskými státy i pro vojenské účely.
Galileo přinese tři druhy kvality služeb:
- Open Service (OS) bude pro každého zdarma. Jeho signály budou využívat 2 pásma: 1164–1214 MHz a 1563–1591 MHz. Přijímače budou mít horizontální přesnost lepší než 4 m a vertikální lepší než 8 m (nebo horizontálně pod 15 m a vertikálně pod 35 m při použití jednoho pásma). Protože bylo dosaženo dohody o kompatibilitě s americkým systémem, budoucí přijímače navíc budou zároveň využívat i GPS.
- Šifrovaný Commercial Service (CS) bude zpoplatněn a poskytne přesnost lepší než 1 m. V kombinaci s pozemními stanicemi může dosáhnout přesnosti až 10 cm. Bude využívat tři pásma - dvě použitá OS a navíc 1260–1300 MHz.
- Šifrované Public Regulated Service (PRS) a Safety of Life Service (SoL) poskytnou přesnost podobnou OS. Budou však odolnější proti rušení a budou schopny detekovat problémy do 10 sekund. Využívat je budou ozbrojené složky a dopravci, u kterých by ztráta přesnosti mohla ohrozit lidské životy (řízení letového provozu...).
Kromě uvedených navigčních služeb budou družice systému Galileo poskytovat i služby nouzové lokalizace v rámci cesvětové družicové záchranné služby Sarsat/Kospas. Oproti ní družice oznámí trosečníkovi, že jeho signály byly zachyceny a lokalizovány.
Realizace projektu je časově rozddělen do tří fází:
- Vývojová fáze - ukončena.
- Ověřování na dráze (IOV - In-Orbit Validation) - zahrnuje vypuštění a provoz čtyř družic, které se na oběžné dráze objeví v letech 2007-2008. V následujícím dvouletém období bude již systém funkční, ale stále ve zkušebním provozu, kdy se budou za provozu testovat provozní podmínky včetně veškerého řídícího a kontrolního pozemního zařízení.
- Fáze rozmístění - vypuštění zbývajících 26 družic a dobudování celé sítě pozemních stanic tak, aby systém byl kompletní v roce 2010.
9.7 Výhody a nevýhody satelitních navigačních systémů
Výhody, nevýhody a odlišnosti satelitových navigačních systémů, z nichž v současné době naprosto převažuje užití systému GPS, lze shrnout do následujících bodů:
- základní výhody:
- celosvětová působnost a dostupnost;
- trojrozměrné souřadnice v jednotném světovém souřadném systému;
- neustálá činnost bez ohledu na denní či noční dobu a počasí;
- stále se zvyšující přesnost A rychlost určení polohy;
- nevýhody:
- závislost na přímé viditelnosti satelitů;
- nemožnost měření v podzemí a v budovách;
- horší výsledky při měření v hustém porostu (v lese), v úzkých hlubokých údolích a v hustě zastavěných oblastech;
- vypočítaná vzdálenost mezi stanicemi je přímou vzdáleností napříč uvedeným elipsoidem.
9.8 Možnosti využití
Technologie globálních polohovacích a navigačních systémů se využívá ve velice širokém spektru činností. Od počátečního využití ve vojenství (letecká a námořní navigace, ovládání raketových systémů, řízení pohybu pozemních sil a zařízení) se jejich využití velmi rychle rozšířilo do civilního sektoru, např. pro navigaci letadel, lodí a pozemních dopravních prostředků, pro řízení průmyslových a zemědělských dopravních a technologických zařízení, do telekomunikačních služeb, rekreačních a sportovních aktivit atd.
Využití globálních polohovacích a navigačních systémů v geovědách přináší nové možnosti při sběru geodat a jejich spolehlivé, přesné a rychlé lokalizaci, což je z hlediska studia, popisu a modelování přírodních objektů a systémů velmi významné a pro návazné rozhodování velmi důležité. Typickými aplikacemi jsou souřadnicové připojení tras geofyzikálního leteckého průzkumu a leteckých a družicových snímků, stanovení polohy průzkumných lodí a vrtných plošin či pozemních technických průzkumných prací.
Cenné služby poskytuji při pozemním mapování v málo známých a špatně přístupných terénech, zvláště tam, kde neexistují dostatečně podrobné a spolehlivé topografické mapy. Lze říci, že jde o nejdůležitější technologickou inovaci pro terénní mapování.
Přesné metody stanovení polohy /(diferenciální navigace, resp. ve specielních případech i relativní fázová měření) umožňuje nejen spolehlivou lokalizaci a popis povrchových průzkumných děl a inženýrských či těžebních prací, ale i řízení pohybu dopravních a technologických zařízení.
Tyto systémy přinesly nové možnosti ve výzkumu deformací zemského povrchu, které jsou vyvolány neotektonickými pohyby, zemětřeseními, vulkanismem a posuny litosférickýh desek. V rámci České republiky se sledování geodynamických procesů soustřeďuje na západočeskou seismoaktivní oblast a na území styky Českého masivu s karpatskou soustavou, ale rovněž i na sledování deformací povrchu podél trasy tranzitního plynovodu či v širším okolí povrchových lomů v podkrušnohorských pánvích.