7. Modelování stability svahů
Metody matematického
modelování stability svahových těles lze v zásadě rozdělit do dvou skupin:
I) metody mezní rovnováhy
II) numerické metody modelování stability
Každá z těchto metod má
své výhody a nevýhody, z hlediska aplikačního se liší v možnostech zahrnutí různých reálných
faktorů do výpočtu, v požadavcích na zjednodušení modelové situace,
v časové náročnosti přípravy modelu a modelového výpočtu a rovněž
v požadavcích na vstupní data výpočtu. Výstižnost matematického modelu a
výsledky získané modelovým výpočtem je nutno vždy podrobit pečlivému rozboru.
7.1 Metody mezní rovnováhy
Základním principem metod
mezní rovnováhy je řešení silové resp. momentové rovnováhy svahového tělesa nad
zvolenou smykovou plochou. Jsou odvozeny za předpokladu existence takového
stavu napjatosti prostředí, při němž je v celé zasažené oblasti
mobilizována využitelná smyková pevnost zeminy a hledá se taková plocha, po níž
by nejsnáze mohlo dojít k usmýknutí (kritická smyková plocha). Metody
mezní rovnováhy nezohledňují přetvárné parametry horninového prostředí.
Výsledkem řešení je stupeň stability, udávající podíl mezi pasivními silami
(síly přispívající ke stabilitě svahu) a silami aktivními (síly přispívající k
nestabilitě svahu), metody neumožňují získat informaci o průběhu napětí a
deformací ve svahovém tělese. Smykové plochy mohou mít v závislosti na
typu zeminy různý tvar (rovinný u nesoudržných zemin; zakřivený, nejčastěji
kruhový, u soudržných zemin). Z řady metod mezní rovnováhy jsou pro řešení
stability svahového tělesa ze soudržných zemin nejčastěji používány proužkové
(švédské) metody (např. Pettersonova a Bishopova
metoda). V případě nejjednodušší Pettersonovy
proužkové metody se celé těleso nad
uvažovanou smykovou plochou rozdělí na určitý počet proužků, provede se
vyhodnocení aktivních a pasivních sil odpovídajících tíhám jednotlivých proužků
a vliv všech uvažovaných proužků se superponuje (Hrubešová, 2003).
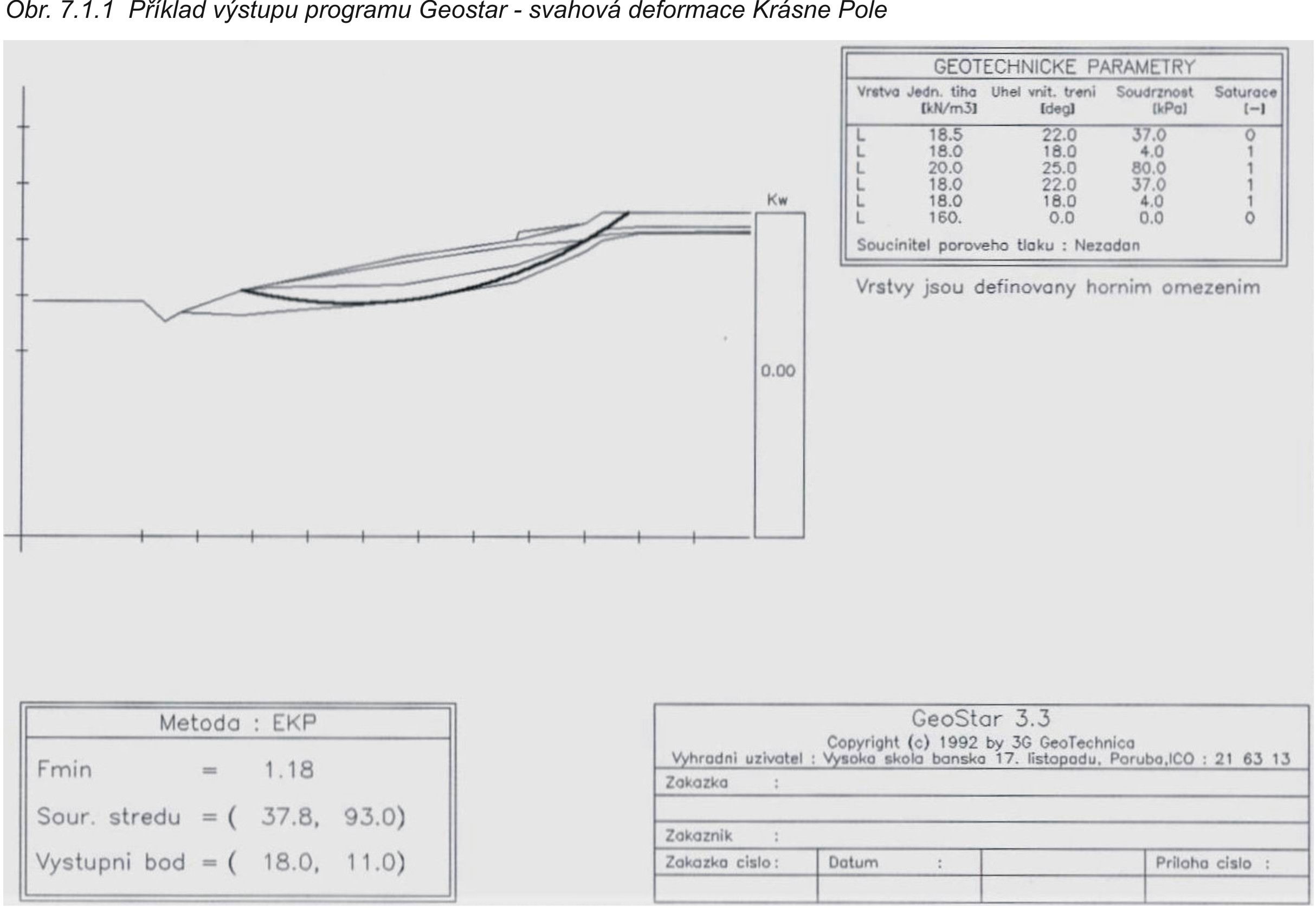
Metoda je implementována
např. v programovém systému GEOSTAR (příklad výstupu obr. 7.1.1) a GEO4 (Česká republika) a GALENA (Austrálie).
{kind=link}
7.2 Numerické metody modelování stability
Obecným principem všech
numerických metod modelování je převedení úlohy pro řešení soustav
diferenciálních rovnic (diferenciální rovnice rovnováhy, Lévyho
rovnice souvislosti přetvoření apod.) na
formálně jednodušší úlohu pro
řešení soustavy lineárních algebraických rovnic pro neznámé hodnoty
posunů resp. rychlostí posunů v uzlových bodech sítě. Na rozdíl od metod
mezní rovnováhy nevyžadují zadání výchozí smykové plochy, zahrnují ve výpočtu i
vliv přetvárného chování horninového prostředí, mají široké možnosti modelování
geometrické a materiálové variability, umožňují získat komplexní představu o napěťodeformační a stabilitní situaci ve svahovém tělese a
modelovat i případná sanační opatření. Jistou nevýhodou všech numerických metod
je poněkud časově náročnější příprava výpočetního modelu, větší nároky na
spolehlivost vstupních parametrů, delší doba výpočtu a v neposlední řadě i
větší nároky na výpočetní techniku (nutnost řešení rozsáhlých soustav rovnic).
Mezi nejčastěji používané numerické metody patří:
a) metoda konečných prvků (FEM)
b) metoda hraničních prvků (hraničních integrálů)(BEM)
c) metoda konečných diferencí (metoda sítí) (FDM)
d) metoda oddělených elementů (DEM)
Metody a) až c) jsou vhodné
pro modelování úloh z oblasti kontinua, metoda oddělených elementů pak
umožňuje řešit úlohy z oblasti diskontinua
(Hrubešová, 2003).
7.2.1 Metoda konečných prvků
Metoda konečných prvků je
numerická metoda , která je nejčastěji používána pro modelování rovinných i
prostorových úloh mechaniky zemních těles. Patří mezi metody variační,
vycházející z minimalizace energetického potenciálu. Podstatou metody je diskretizace zkoumané oblasti na rovinné nebo prostorové
prvky konečných rozměrů (tzv. generace sítě), které jsou mezi sebou spojeny
pouze konečným počtem uzlových bodů. Nejčastěji používaným typem konečných
prvků v rovině jsou trojúhelníky. Zkoumané těleso je pak zatíženo silami
působícími ve vrcholech (uzlech) konečných prvků, které jsou ekvivaletní původnímu zatížení. Na každém konečném prvku se
volí vhodná aproximační funkce přesného řešení, která jednoznačně definuje stav
posunutí uvnitř tohoto prvku pomocí posunutí jeho uzlů. Na základě této
aproximace se pak s využitím podmínek pro minimalizaci energetického
potenciálu odvodí pro každý uzel rovnice rovnováhy , která je funkcí těchto
neznámých posunutí v uzlových bodech sítě. Řešením takto získané soustavy
algebraických rovnic, představujících podmínky rovnováhy ve všech uzlových
bodech ,jsou hodnoty posunů v těchto uzlových bodech. Tyto posuny pak
společně s přetvárnými charakteristikami materiálu a zvoleným
konstitutivním vztahem mezi napětím a přetvořením definují napěťový stav jak
uvnitř prvku, tak i na jeho hranicích. Metoda konečných prvků umožňuje řešit
úlohy se složitými okrajovými podmínkami, se složitou geometrií, umožňuje
zohlednit chování materiálů charakterizované různými konstitučními vztahy,
přičemž každý prvek může mít odlišné vlastnosti.
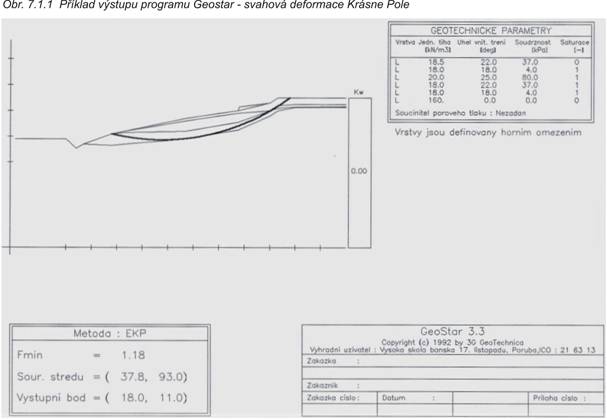
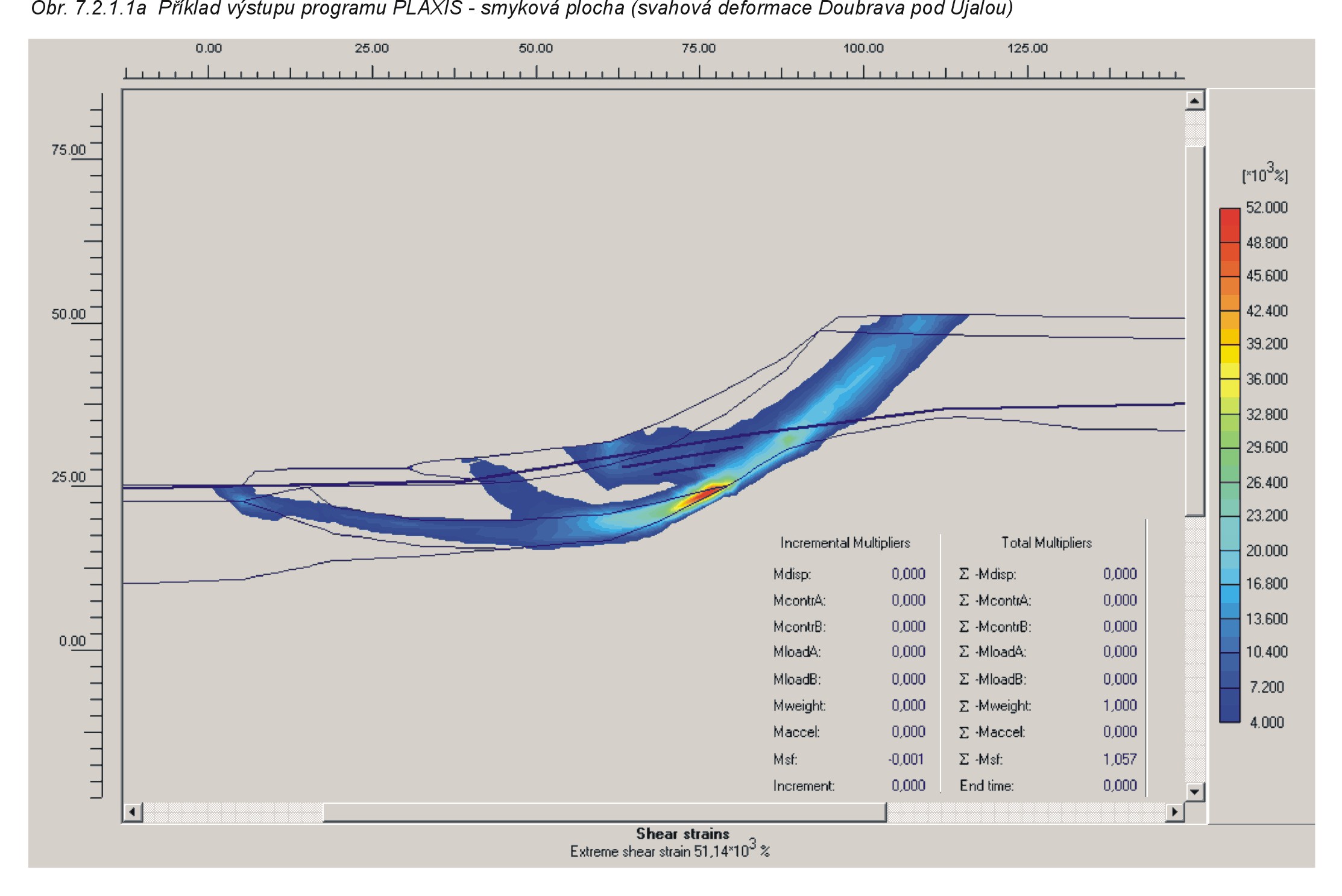
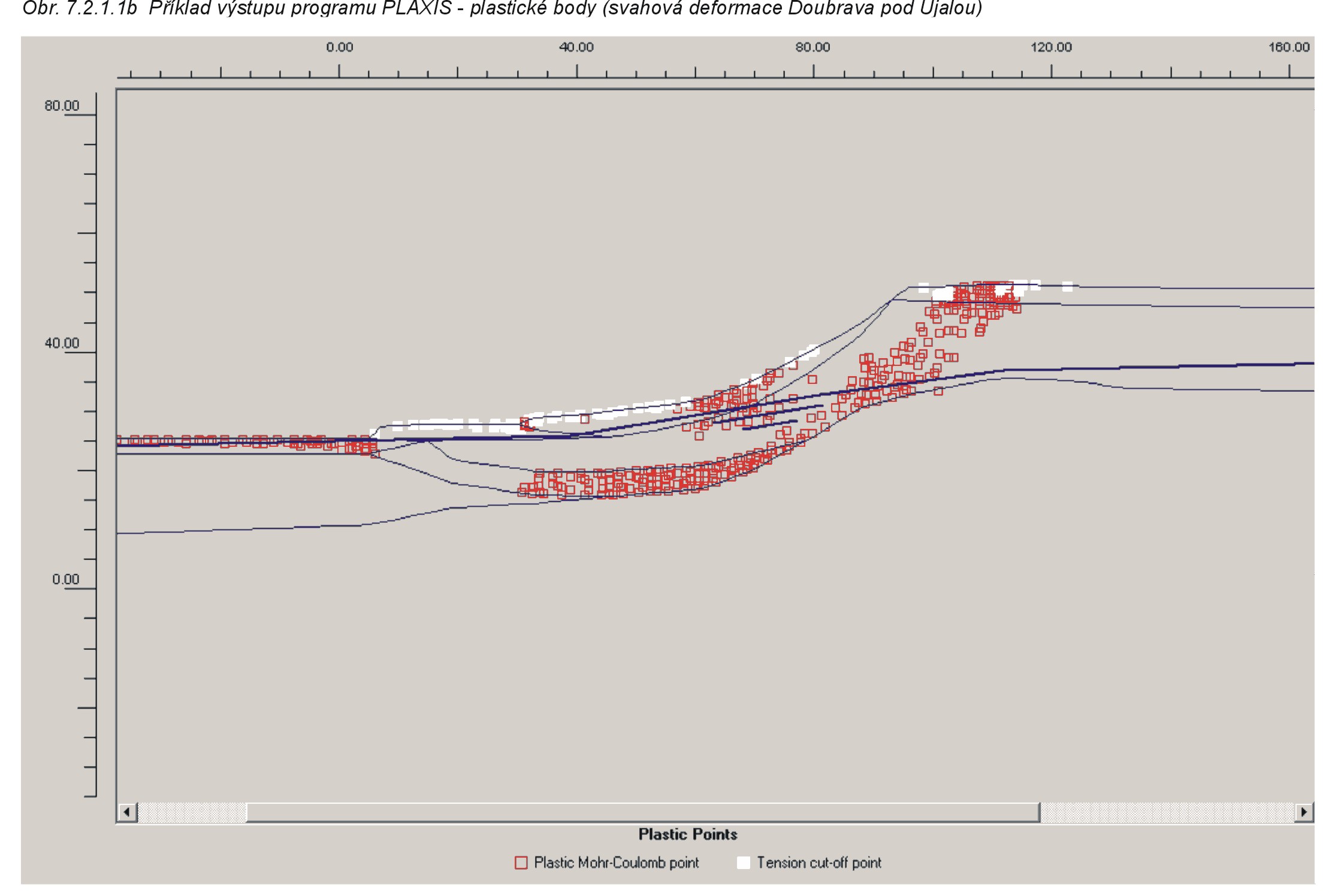
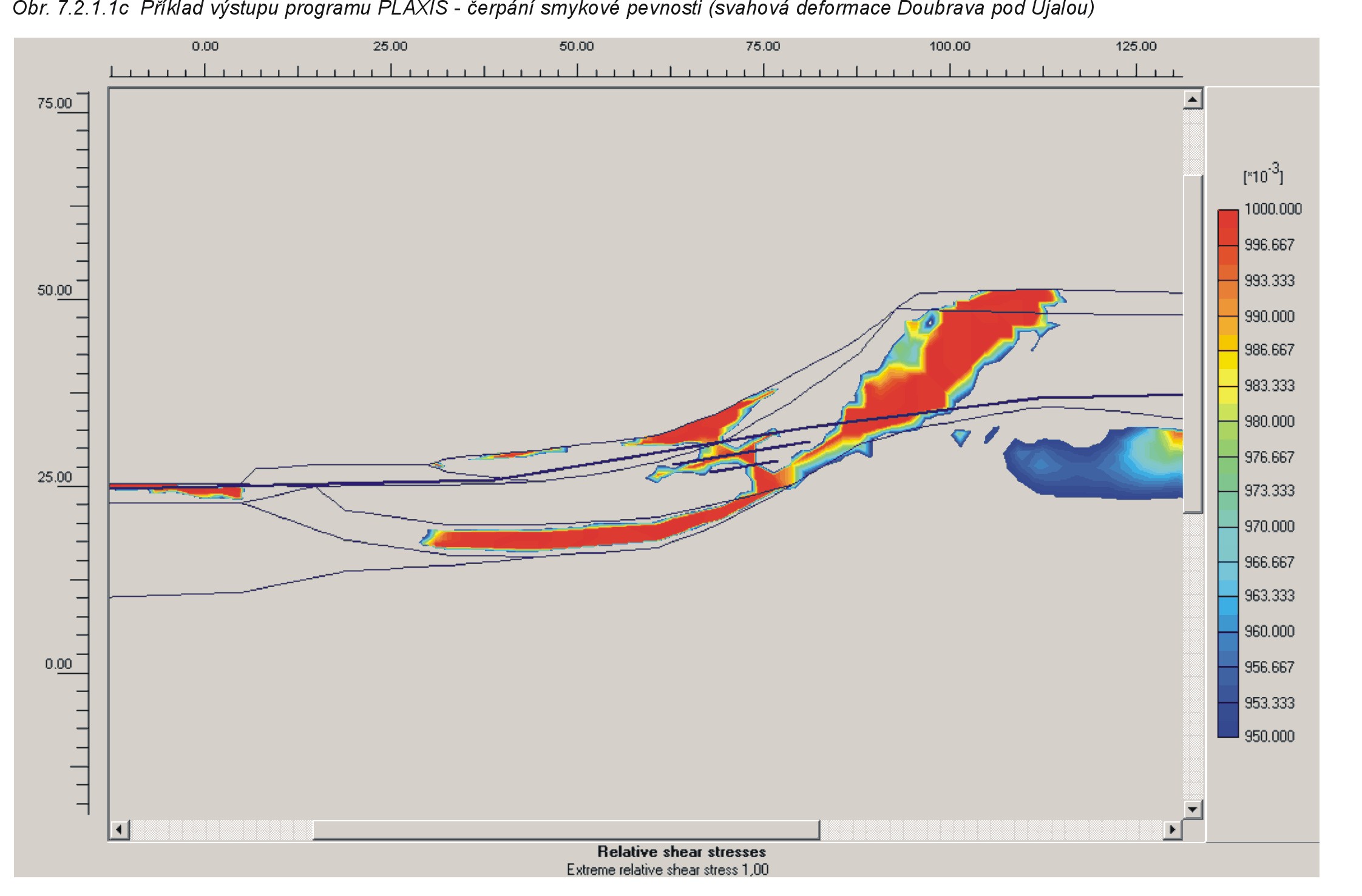
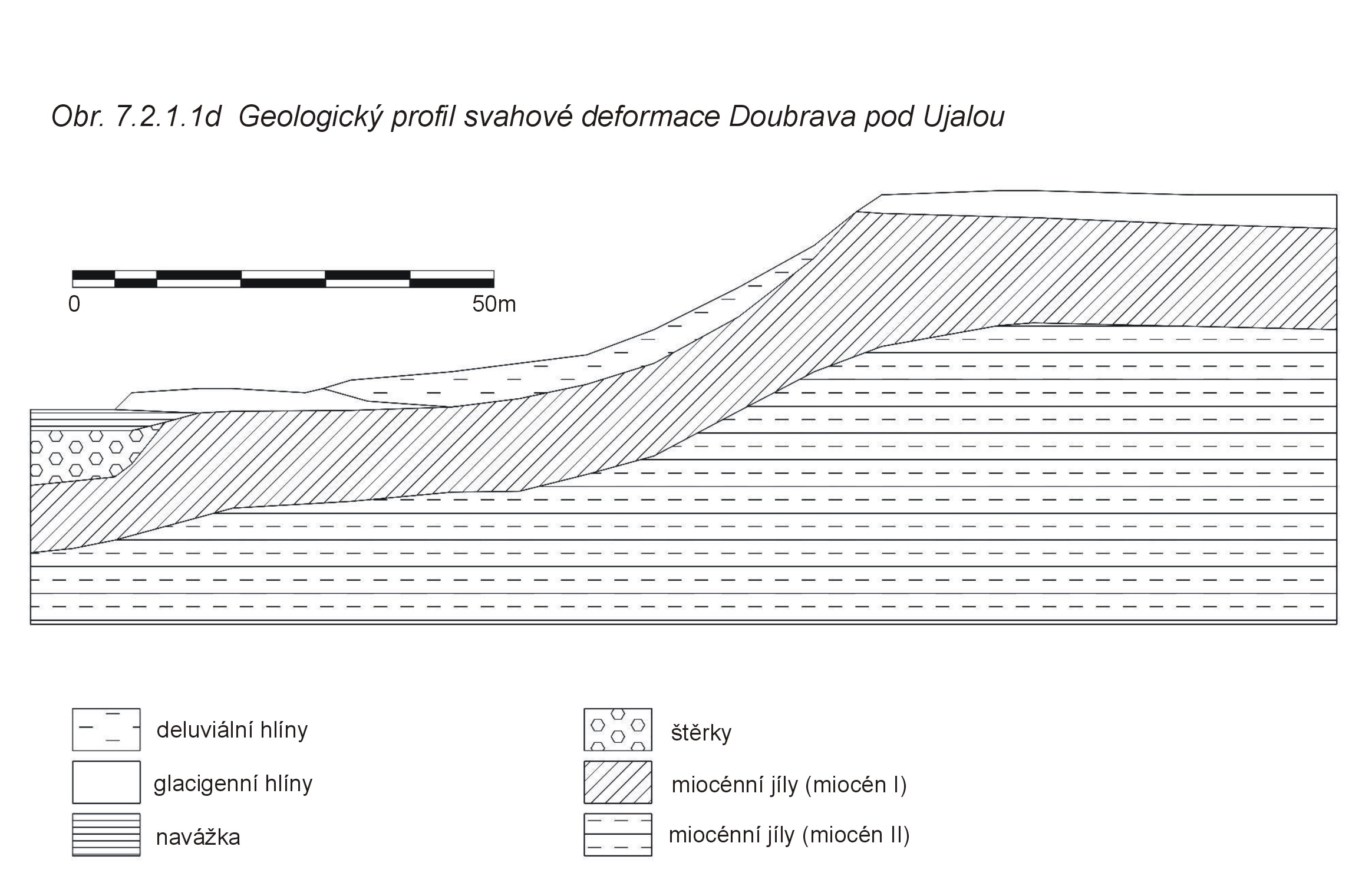
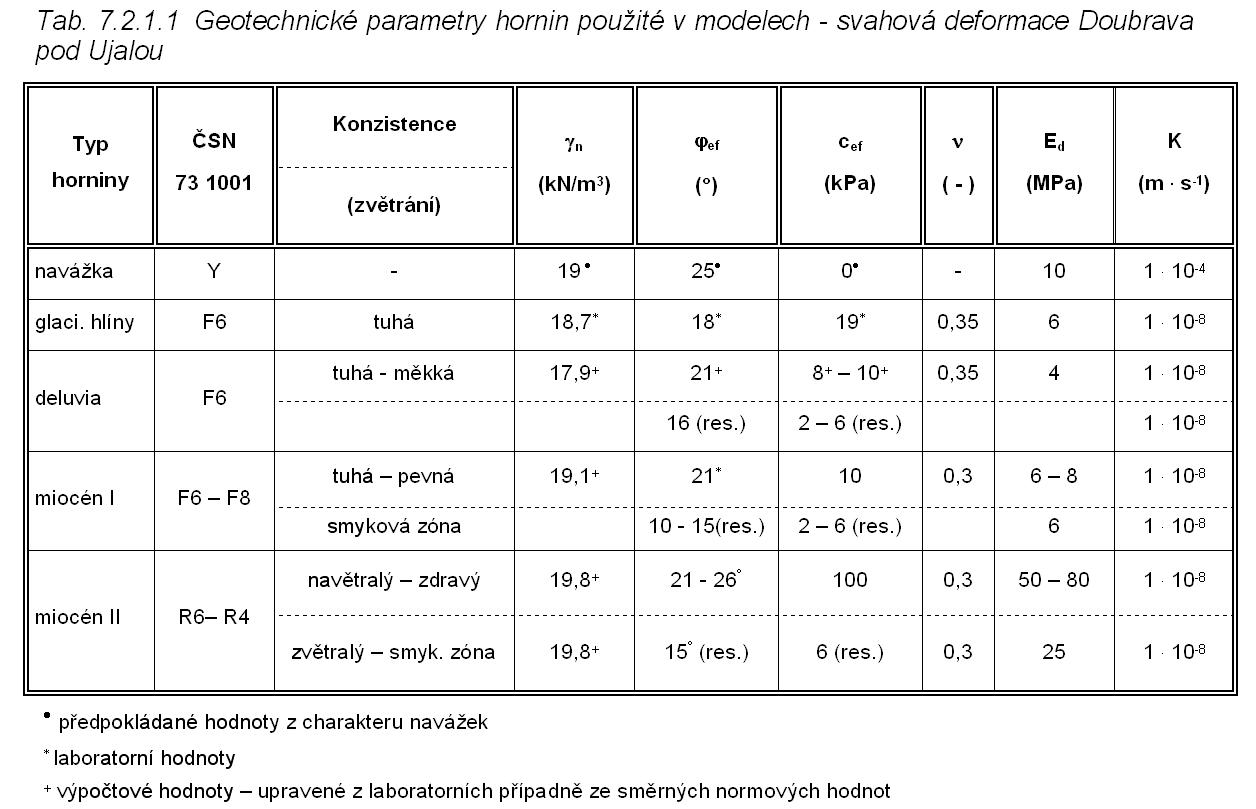
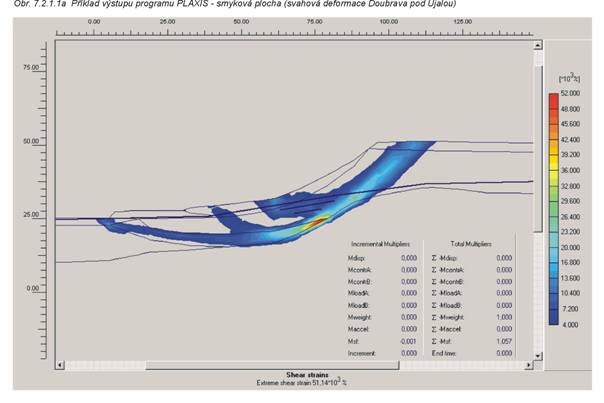
Metoda je implementována
např. v programech PLAXIS (příklad výstupu obr.7.2.1.1a, obr. 7.2.1.1b, obr. 7.2.1.1c s geologickým profilem obr. 7.2.1.1d a geotechnickými parametry tab. 7.2.1.1) - Holandsko, CESAR-LCPC (Francie), GEO-SLOPE (Kanada).
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
7.2.2 Metoda hraničních prvků
Metoda hraničních prvků se
začala rozvíjet především v souvislosti s potřebou snížit dimenzi
výsledné soustavy rovnic, která byla výsledkem aplikace metody konečných prvků
, a to především v případě prostorových modelů. Hlavní výhodou této metody
je totiž snížení dimenze úlohy o jedničku, neboť se diskretizuje nikoliv celá uvažovaná oblast, ale pouze její
hranice. Na každém hraničním prvku se aproximuje přesné řešení úlohy
z uzlových bodů pomocí
interpolačních funkcí. Po vyřešení odpovídající soustavy rovnic pro
neznámé hodnoty posunů na hranicích oblasti se odpovídající hodnoty posunů
resp. napětí uvnitř oblasti stanoví analyticky na základě tzv. fundamentálního
řešení. Nevýhodami této metody je především nutnost znalosti fundamentálního
řešení a dále nutný předpoklad homogenního prostředí uvnitř modelované oblasti.
V souvislosti s rozvojem stále výkonnější výpočetní techniky se tato
metoda dostává poněkud do pozadí (Hrubešová, 2003).
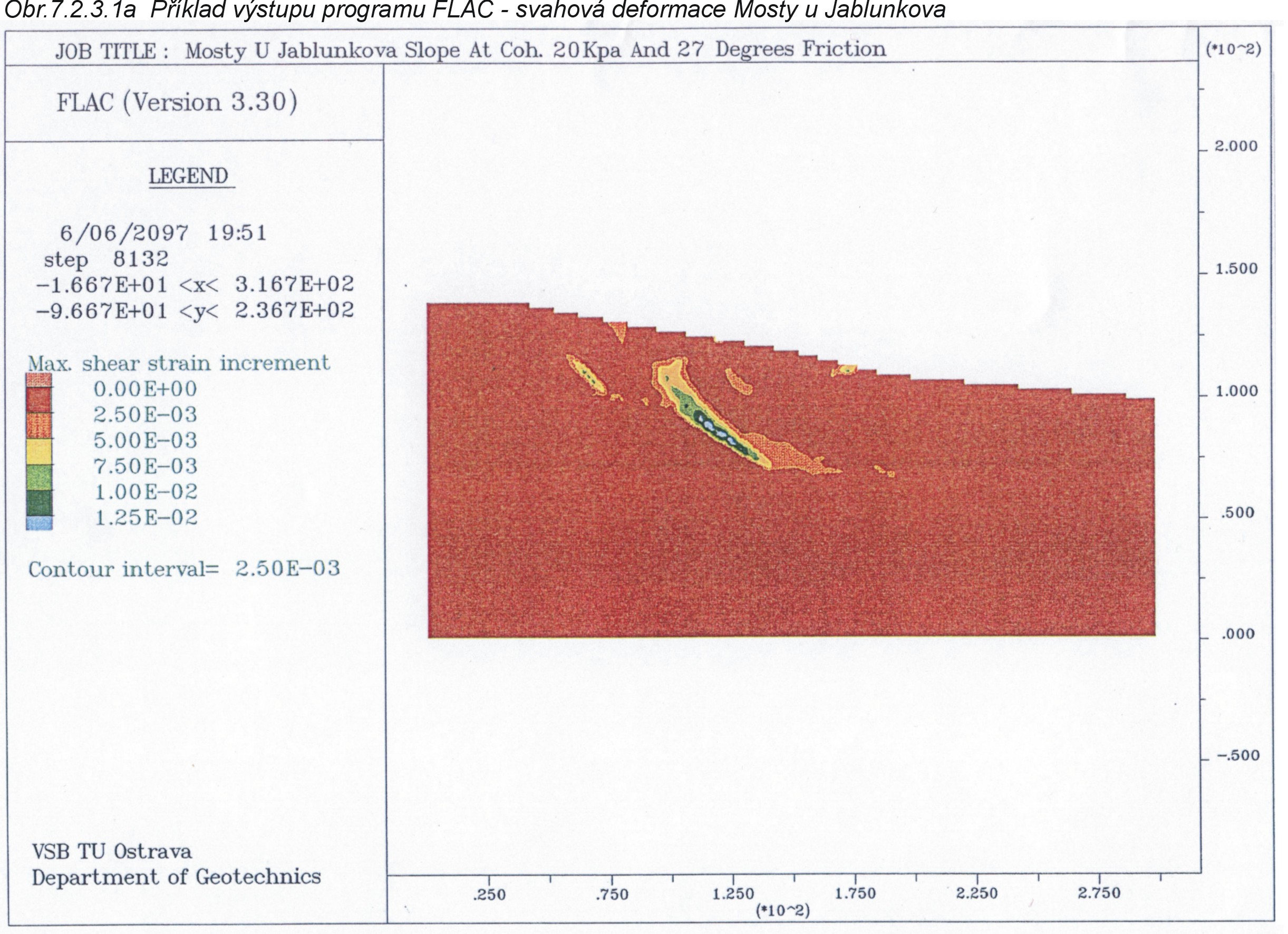
7.2.3 Metoda konečných diferencí (metoda sítí)
Podstatou metody konečných
diferencí je pokrytí oblasti, v níž hledáme řešení diferenciální rovnice,
sítí, která se skládá z konečného
počtu uzlových bodů. V každém bodě sítě se nahradí derivace v těchto
uzlových bodech příslušnými diferencemi, tj. lineárními kombinacemi funkčních
hodnot v okolních bodech. V závislosti na tom, zda volíme diference dopředné či zpětné, dostáváme různé typy metody sítí
(metody explicitní, implicitní). Po záměně derivací diferencemi ve všech
uzlových bodech dostáváme soustavu lineárních algebraických rovnic
s neznámými hodnotami posunů v těchto uzlových bodech (Hrubešová,
2003).
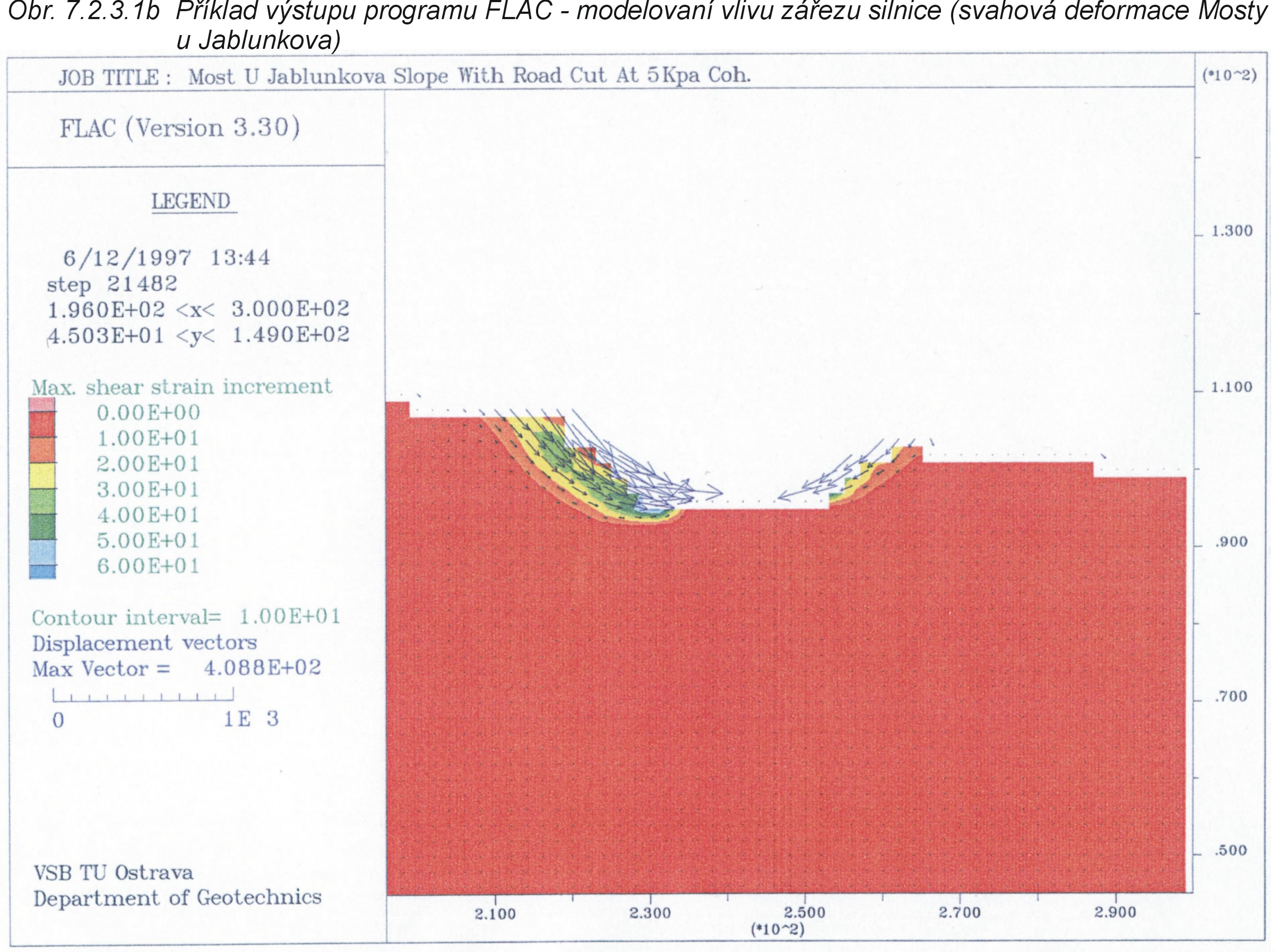
Metoda je implementována
např. v programovém systému FLAC (příklad výstupu obr.7.2.3.1a, obr.7.2.3.1b) - ITASCA, USA.
{kind=link}
{kind=link}
7.2.4 Metoda oddělených elementů
Metoda oddělených elementů
je metoda vhodná pro modelování diskontinua .
Modeluje se vzájemná interakce tuhých nebo deformovatelných
bloků, přičemž úloha diskontinuit je dominantní. Deformovatelné
bloky se dále dělí na trojúhelníkové zóny , přičemž je pro výpočet přetvoření,
napětí a vnitřních sil na základě hodnot rychlostí v uzlech zón využita
modifikovaná explicitní metoda konečných diferencí. Úloha o spolupůsobení bloku
se svým okolím je výpočetně řešena pro tak krátký časový okamžik, že impuls od
jednoho bloku může být v daném výpočetním kroku předán pouze na jeho
kontakty. Interakci a pohyb sousedících bloků lze pak popsat explicitními
rovnicemi a šíření impulsů vyjádřit velkým počtem výpočetních cyklů,
v nichž dochází k postupnému vyrovnávání nerovnovážného stavu bloků a
kontaktů (dynamická relaxace) .Ve výpočetním cyklu se tedy řeší dynamická
rovnováha a primárně neznámými hodnotami jsou hodnoty rychlostí v uzlech
zón.
Tento algoritmus
umožňuje modelovat statické a dynamické úlohy pro nespojité
prostředí bloků a kontaktů s respektováním fyzikální nelinearity ,
plastického tečení a porušení látek včetně velkých deformací, smykání a
separace bloků, modelování proudění kapalin v puklinách a
řešení sdružené mechanicko-hydraulické popř. mechanicko-termální úlohy
(Hrubešová, 2003).
Metoda je implementována
v programovém systému UDEC (ITASCA, USA).