Technika a technologie hlubinného vrtání
2.1 Základní typy inklinometrů Eastman
2.2 Nepřetržité měření křivosti vrtu v průběhu vrtání – systémy MWD
4.1 Technické prostředky na usměrnění vrtu při otáčející se vrtné koloně
4.2 Technické prostředky na usměrnění vrtu s přímým pohonem dláta
Samovolné křivení se vrtů
Je všeobecně známo, že vrtná technika zatím není schopna vyhloubit dokonale přímý vrt, a to ani ve svislém, tím méně v jiném směru. Pro potřeby vrtných prací byly tedy již stanoveny obecné předpisy pro maximální zkřivení vrtu a pro maximální úchylky od tížnice a technika jejich zjišťování i nápravy.
Jako relativně přímý vrt byl Pražským pro jádrové vrty definován takový vrt, jehož osa má odchylku menší než 0,1° na 30 m vzhledem ke směru předcházejícího úseku a jehož celková odchylka v půdorysném průmětu nepřekračuje 2°. Jako relativně svislý vrt byl definován takový vrt, který nevybočuje ze svislého kuželu o vrcholovém úhlu 4°, tj. nanejvýše o 2° od tížnice.
Pro přesnou definici průběhu osy vrtu musí být dány dva základní parametry: ∂ - velikost úklonu vrtu od tížnice a σ - směr úklonu vrtu (obr. 1).
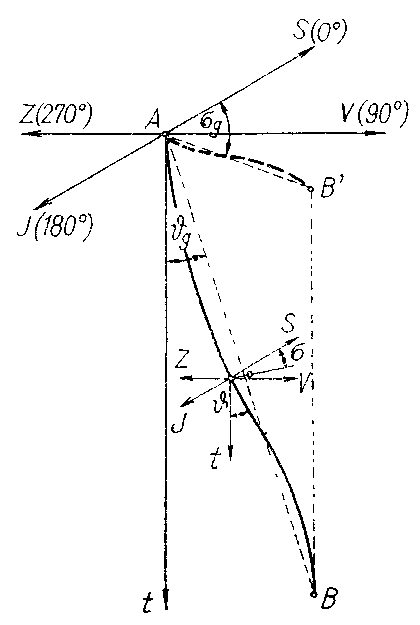 Obr. 1: Místní a generelní úklon a směr křivého vrtu
Obr. 1: Místní a generelní úklon a směr křivého vrtu
Úklon se měří od tížnice procházející středem ústí vrtu, takže svislý vrt hloubený směrem dolů bude mít ∂ = O, vodorovný ∂ = 90° a svislý vrt dovrchní ∂ = 180°. Protože vrty nemají přímkový tvar, musíme je rozdělit na úseky, které lze nahradit přímkou. Každý z těchto úseků pak definujeme jednou dvojicí uvedených úhlů, které v tomto úseku považujeme za konstantní. Délku těchto úseků volíme tím menší, čím přesněji chceme vyjádřit průběh osy; pro šikmé a usměrněné vrty to bývá 5 až 10 m, pro běžné "svislé" vrty 20 až 50 m.
Pro hrubé definování průběhu vrtu se používá hodnot generelních – generelní směr úklonu σg, daný spojnicí středu ústí a průmětu středu dna vrtu do úrovně ústí vrtu, a generelní úklon ∂g daný úhlem sevřeným tížnicí a spojnicí středu ústí vrtu se středem dna vrtu (obr. 1). Křivost vrtu však charakterizuje nejlépe poloměr zakřivení ® osy vrtu v daném úseku.
Pojmem křivení vrtu rozumíme samovolnou změnu průběhu osy vrtu, která probíhá bez našeho úmyslu nebo i proti naší vůli; naproti tomu usměrňování vrtu je výsledkem našeho zásahu, jímž byl změněn průběh osy vrtu podle naší vůle.
1 Příčiny křivení se vrtů
Křivost vrtu je příčinou mnoha obtíží jak technického, tak geologického rázu. Z technického hlediska je to zejména snížený výkon, značné opotřebení vrtné kolony, zvýšené nebezpečí havárií apod. Z hlediska geologického je to zejména nutnost přepočítávat všechny údaje na teoreticky přímý vrt, popř. nezasažení cílové oblasti, nedodržení sítě vrtů v ložisku apod.
Příčiny samovolného křivení vrtů lze shrnout do tří skupin:
- technické příčiny křivení vrtu, které jsou ovladatelné složením vrtné kolony a volbou vrtného nástroje před závrtem;
- technologické příčiny křivení vrtů, které jsou ovladatelné během závrtu (složky režimu vrtání);
- geologické příčiny křivené vrtů, které jsou neovladatelné.
Z provedených průzkumů a rozborů lze předpokládat, že u hlubokých vrtů hloubených moderní technologií rotačního vrtání dochází k prvním zřetelnějším odchylkám od svislého směru od hloubek kolem 200 m.
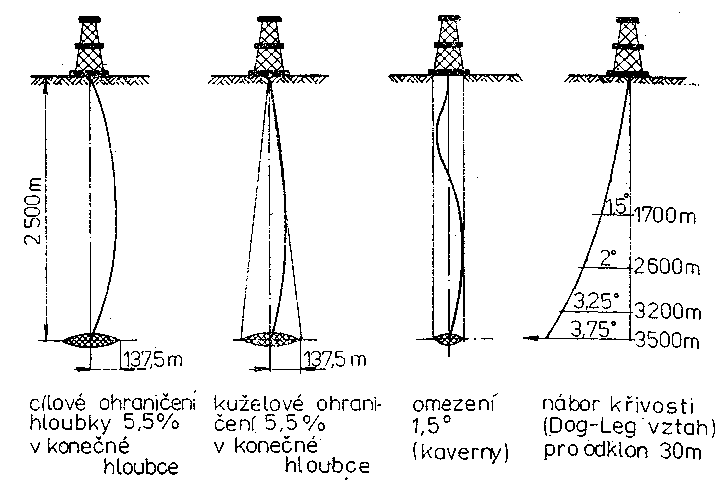
Pozn.: Dog-Leg = stupeň obtížnosti zkřivení
Obr. 2: Dovolené odchylky křivení vrtůU neusměrněných vrtů se podle Schneiderwinda zpravidla stanovuje v projektech hlubokých vrtů na ropu a zemní plyn (pokud není určeno jinak lokální normou) dovolená odchylka vrtu nebo kruhový prostor v konečné (projektované hloubce (viz obr. 2):
| interval vrtu nad předpokládanou konečnou hloubkou | maximální přípustný odklon vrtu – ve stupních na 30 m – |
| - od konečné hloubky až 300 m výše | 3 ¾ |
| - od 300 až 600 m výše | 3 ¼ |
| - od 600 až 900 m výše | 2 |
| - nad těmito intervaly | 1 ½ |
Do skupiny technických příčin křivení vrtů lze zařadit takové, které souvisejí s nesprávným sestavením vrtné soupravy a s prací při nevhodné kombinaci kolony vrtného nářadí. Rozbory ukazují, že vliv těchto faktorů se projevuje především na počátku vrtání, avšak s přibývající hloubkou jejich význam stále klesá.
Z hlavních příčin lze uvést následující:
- nesprávná montáž vrtné soupravy (nebo nevhodný typ) – vadné usazení vrtného zařízení, rotačního stolu, nevhodný příkon apod.,
- svislost vrtné věže není v ose s rotačním stolem,
- rotační stůl není instalován horizontálně,
- šikmé usazení řídicí, resp. úvodní kolony,
- používání křivých vrtných trubek,
- neproporciální poměr průměru vrtného nářadí a průměru vrtu (dláta),
- nedostatečná, resp. nevhodná stabilizace spodní části kolony vrtného nářadí.
Příčiny technologického charakteru jsou dílem předcházející části problémů přenesené na některé parametry režimu vrtání. Týká se to především nevhodných vztahů přítlaku a otáček na dláto, nesprávných poměrů hydraulické účinnosti výplachu a průměru trysek, vhodnosti dlát apod.
Poslední skupinou, neméně vážnou, jsou příčiny geologické, které jsou vyvolávány nestejnorodostí hornin provrtávaných intervalů vrtu. Jsou to:
- střídající se úklony vrstev hornin s velmi rozdílnou fyzikálně mechanickou charakteristikou,
- kavernózní horniny, příp. náchylnosti k jejich zavalování,
- složitá tektonická a poruchová pásma v některých částech profilu vrtu.
Typické příklady křivení vrtu uvádí obr. 3.
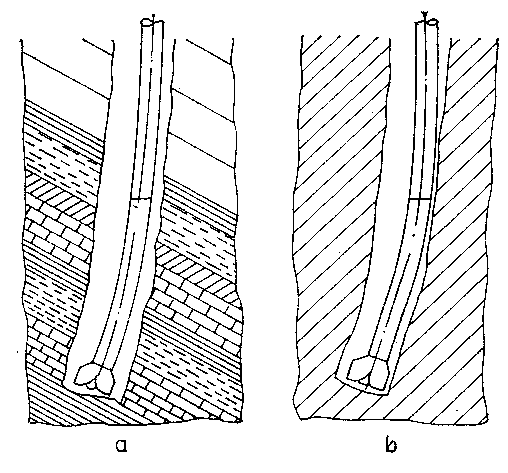 Obr. 3: Příčiny křivení vrtu:
Obr. 3: Příčiny křivení vrtu:
a – vlivem šikmo uložených vrstev; b – vlivem průhybu vrtné kolony
2 Měření křivého vrtu, technické prostředky pro stanovení průběhu osy vrtu
Pro získání hodnotných údajů při vrtných pracích je nutné znát skutečnou polohu stvolů vrtů v prostoru. Jak již bylo uvedeno dříve, tato poloha je určena zenitním úhlem (úhlem odklonu stvolu vrtu od tížnice), azimutem a hloubkou vrtu. Abychom mohli určit tyto veličiny v procesu hloubení vrtu, je nutno stále měřit úhly zkřivení vrtu a také provádět kontrolní záměry hloubky vrtu.
Systematická kontrola křivosti vrtu v procesu jeho hloubení umožňuje získat úplnou představu o charakteru zkřivení, jeho intenzitě, posunu jednotlivých bodů stvolu vrtu od vertikály, což ve své podstatě značně ulehčuje vytvoření správných závěrů o stavbě geologické struktury.
V rámci vrtných prací a zvláště při technice usměrněného vrtání zaujímají tedy metody měření důležité místo pro určení průběhu vrtu. Pro některá rozhodnutí geologická a technicko-ložisková je znalost přesného průběhu vrtu někdy zvlášť významná. Také likvidace erupce při vrtání odlehčujícího vrtu je úspěšná jen tehdy, je-li průběh vrtu přesně znám, čili zde platí dvojnásobně – pracovat podle pečlivého a dobře promyšleného měřicího programu. Toto platí pro usměrněné vrty přesně tak, že nejsou vertikálně vrtány a při nízkém počtu kontrolních měření lze neznalost jejich odklonů považovat za nebezpečnou.
Čím více je k dispozici hodnot o geometrii vrtu, o to lehčí bude rozhodování o plánovaném průběhu dalších vrtů. Lze tedy úvodem shrnout, že nedostatečný program měření má pak velké následky v nákladovosti vrtů.
Jak se vrt křiví zjistíme z inklinometrických měření. Používají se přitom inklinometry, kterými se měří odklon, resp. odklon a azimut. Inklinometry se zapouštějí do vrtu na kabelu a tato měření jsou potom zahrnuta do karotážní služby společnosti. Nás však více zajímají inklinometry vhazované do vrtné kolony, kdy měření si vrtná osádka dělá sama. Na povrch se vytahují tzv. overshotem na lanku, nebo běžněji po skončení návrtu společně s vrtnou kolonou. Podle způsobu záznamu je rozdělujeme na inklinometry s fotografickým, mechanickým a elektronickým záznamem a podle počtů záměrů na přístroje pro jeden záměr v dané hloubce nebo přístroje s možností více záměrů v různých hloubkách. Typickou společností, která vyrábí inklinometry tohoto typu je společnost EASTMAN. Inklinometry této společnosti s ponecháním jejich typového označení v angličtině jsou uvedeny v tabulce č. 1. U nás se nejvíce používají inklinometry s fotografickým záznamem a do větších hloubek s vyššími teplotami inklinometry s mechanickým záznamem.
| bez kabelového spojení | fotografický záznam | jednozáměrové vícezáměrové | Singl Shot Multi Shot |
| mechanický záznam | jednozáměrové | Twin Shot (Drift indicator) Mechanical Single Shot | |
| elektronický záznam | jednozáměrové vícezáměrové | Elektronical Singl Shot Digi Course I + Geodata Store |
2.1 Základní typy inklinometrů Eastman
Přístroj na měření úhlu odklonu (Drift indikátor)
Je to přístroj, který se vhazuje do vrtné kolony a který registruje křivost vrtu na konci návrtu před vytáhnutím této vrtné kolony. Přístroj má mechanický záznam. Křivost vrtu se vyznačí na kruhovém papírovém terčíku dvěma vpichy, které následují po sobě asi po minutové přestávce, při pootočení terčíku o 180°. Správnost jejich funkce se kontroluje tak, že oba vpichy musí indikovat stejnou křivost a musí ležet na přímce, která prochází středem terčíku. Terčík se na hrot kyvadla pootočí a přitlačí pomocí hodinového strojku s možností časového nastavení měření v rozsahu 0 až 45 minut. Výměnou kyvadla změníme rozsahy do 3°, 6°, 12° a 30°. Kyvadla pro uvedené rozsahy se odlišují délkou. Nejdelší kyvadlo je pro nejmenší křivost. Přístrojová část je uložena v mosazném pouzdře v dolní části ukončené silnou pružinou s gumovým hrotem amortizujícím náraz o sedlo. Sedlo je vložené mezi dlátem a zátěžkou a jeho účelem je centrovat spodní konec přístroje. Horní konec pouzdra se centruje gumovými palci pootočenými vůči sobě o 90°. Takto je zabezpečená souosost pouzdra a zátěžky a tím i správnost měření úhlu odklonu.
Přístroj na měření úhlu odklonu a azimutu v jednom záběru (Single Shot)
Single Shot je magnetický přístroj na současné měření odklonu a azimutu a jejich registraci fotografickou cestou na filmový kotouček. Azimut se měří magnetickou růžicí s funkcí střelky, která je dělená po pěti stupních od 0 do 360° a při měření se udržuje ve vodorovné poloze.
Odklon se měří kyvadlovým zařízením v kardanovém závěsu a odečítá se na soustředných kružnicích na růžici s krokem 1°. Fotografická část přístroje spolu s osvětlovacími žárovkami je umístěná nad měřicí jednotkou. Ovládá se časovacím, mechanickým nebo elektronickým zařízením, které vyděluje čas potřebný na dopravu inklinometru až do sedla v nemagnetické zátěžce nad dlátem a které zároveň řídí čas expozice (objektiv nemá clonový uzávěr). Pouzdro s měřicí jednotkou je zaplněné kapalinou, která tlumí pohyby volných částí a chrání jednotku vůči vnějším nárazům. Po zapuštění inklinometru a osvětlením měřicí jednotky se na citlivý kotouček zaznamenává poloha magnetické růžice a kyvadélka s vlasovým nitkovým křížem (obr. 4). Odklon se určí podle počtu soustředných kružnic od středu kotoučku (na obr. 4 je to 5°30´). Azimut vrtu se odečítá na stupnici růžice na přímce proložené středem růžice a nitkového kříže kyvadélka (úhel N35°W na obr. 4 převedený do našeho systému zobrazování je 325°).
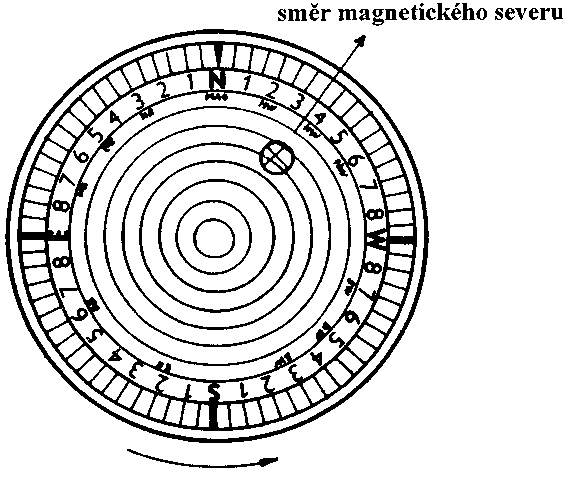 Obr. 4: Schéma fotografického záznamu inklinometru Single-Shot
Obr. 4: Schéma fotografického záznamu inklinometru Single-Shot
Přístroj Multi Shot
Přístrojem Multi Shot se měří odklon a azimut ve více záměrech. Princip měření je stejný jako Single Shotem, takže se měří úhel odklonu a azimut v magneticky neovlivněných vrtech, avšak s možností více záměrů (maximálně 350). Jednotlivá měření se ve stanovených časových úsecích exponují na film. Kromě systému ovládání a posunu filmového pásu je princip měření a měřicí části shodný s přístrojem Singl Shot. Série záznamů Multi Shotem se obyčejně získávají při tažení nářadí tehdy, když je vrtná kolona v klidu, tedy tehdy, když uvolněný vrtný pás stavíme do věže. Maximální čas měření je podle typu 24 resp. 32 hodin se čtyřminutovým intervalem expozice, avšak i tento čas je možno měnit. S rozvojem mikroelektroniky se objevily přístroje, které v interní paměti zaregistrují naměřené hodnoty. Tyto hodnoty lze po vytáhnutí přístroje na povrch přenést na displej, resp. tiskárnu. společnost Eastman je vyrábí pod názvem Geodata Store a Digi Course. Princip měření zemského magnetismu, při kterém se používají uvedené přístroje, vyžaduje zařízení nemagnetických zátěžek do zátěžkové kolony.
2.2 Nepřetržité měření křivosti vrtu v průběhu vrtání – systémy MWD
Kvalita poznatků o průběhu vrtu závisí na množství počtu měření a přesnosti použitých měřicích přístrojů. Inklinometry splňují druhé kritérium, ale počet měření s nimi má ekonomické omezení. Tato situace byla podnětem k vývoji přístrojů na měření na počvě vrtu a způsobů přenosu naměřených údajů na povrch. Tento systém se označuje MWD (z angl. Measurement While Drilling – měření v průběhu vrtání) a je synonymem pro komunikaci ze spodní části kolony na povrch. Podle použitého senzoru se mohou přenášet na povrch údaje o orientaci vrtu, poloze nářadí. Způsob jakým se mohou přenášet údaje na povrch, umožňuje přehledně rozdělit systém MWD. Signál se může přenášet čtyřmi způsoby:
Elektrický přenos údajů „tvrdým" spojem, speciálně upravenými spoji vrtných trubek, nebo krátkým kabelovým spojením. V této skupině jsou ekonomicky i technicky výhodnější systémy s kabelovým spojením. Předností těchto systémů je konstrukční jednoduchost, relativně nízká cena a spolehlivost. Nejvíce se používají řídicí přístroje (Steering Tools) s centrálním zapouštěním kabelu nebo bočním vyvedení kabelu do mezikruží. Při jejich použití musí být vrtná kolona v klidu, může se tedy použít jen při vrtání s ponorným motorem. Jejich společnou výhodou je nepřetržité snímání a možnost přímého zjišťování reakčního momentu ponorného motoru. Při nastavování vrtné kolony se přístroje s centrálním kabelem (vyvedený přes ucpávku ve výplachové hlavě) musí vytáhnout a po prodloužení znovu zapustit.
Akustická a elektromagnetická telemetrie, v prvém případě kolonou a výplachem, v druhém případě kolonou a horninou. Akustická telemetrie není pro značný útlum akustického signálu (víc než 150 dB/1 000 m při frekvenci 5 kHz) ve vrtné koloně ponořené do výplachu, tak i pro signály s nižší frekvencí pro tento účel vhodná. Okolní hluk při vrtání překrývá malou intenzitu vyvolaných akustických signálů.
Elektromagnetická telemetrie v nynějším stupni vývoje předpokládá systém zesilovačů každých 1 000 m, což není pro daný účel reálné. I přechod horninou má velký útlum signálu a mohou se přenášet jen signály s nízkou frekvencí (do 200 Hz), těžko se filtrují a na jejich vznik je potřebný silný energetický zdroj.
Telemetrie tlakových impulzů je metoda přenášení informací na proudící sloupec výplachu. Tlak v proudícím výplachu je periodicky modulovaný mechanickými prostředky a výsledné tlakové impulsy jsou na povrch demodulovány. Impulsy vznikají umístěním přestavitelné překážky do dráhy proudu výplachu (pozitivní pulzy) nebo se používá ventil, který reguluje průtok části výplachu z vrtné kolony do mezikruží a způsobuje okamžitý pokles tlaku v koloně (negativní pulzy).
3 Způsoby zobrazení prostorového průběhu vrtu
Na základě výsledků měření zkřivení vrtu se stanoví jeho prostorová poloha. V současné době jsou známy dvě základní metody zpracování údajů inklinometrických měření:
- hodnota příslušného úhlu, zjištěného na konci daného intervalu, je přiřazena k celému intervalu,
- hodnota příslušného úhlu každého hloubkového intervalu se stanoví jako průměr hodnot na počátku a konci intervalu.
Srovnáním obou metod ve stejných podmínkách byl učiněn závěr, že druhá metoda je přesnější a přináší lepší výsledky.
Jestliže osa vrtu je zkřivena pouze ve vertikální rovině a změny azimutu jsou velmi malé, téměř zanedbatelné, lze sestrojit vertikální projekci osy vrtu na rovinu zkřivení ve formě lomené čáry. Přitom úseky vrtu, ohraničené dvěma body, v nichž byly měřeny hodnoty úhlů (θ a α) jsou úsečkami, ukloněnými od vertikály pod úhly
Předpokládejme, že zenitní úhel se měří každých (1) metrů a v bodech 0, 1, 2, 3, atd. byly získány odpovídající hodnoty θ0, θ1, θ2, θ3 atd. ve stupních. Průměrné hodnoty zenitních úhlů pro každý interval se určí jako
Vyznačíme si ústí vrtu a z tohoto bodu vedeme přímku pod úhlem (θ0-1) – obr. 5.
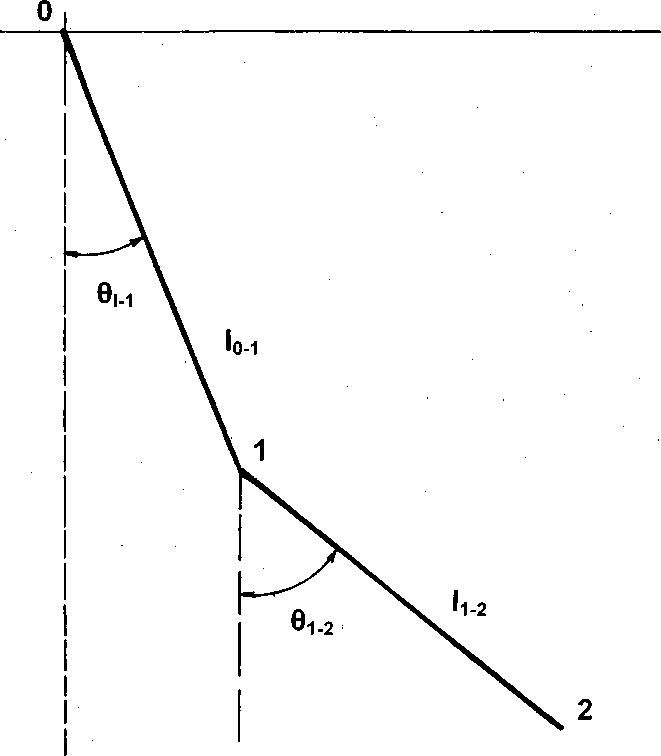 Obr. 5: Vertikální projekce osy vrtu
Obr. 5: Vertikální projekce osy vrtu
Na této přímce potom v měřítku vyneseme vzdálenost (l0-1). Ze získaného bodu (1) vedeme přímku pod úhlem (θ1-2) a vymezením vzdálenosti (l1-2) získáme bod (2) atd.
V případě, že osa vrtu je prostorová křivka, což je v praxi častější, nutno také brát v úvahu změny horizontální polohy osy vrtu. Z tohoto důvodu se sestrojuje horizontální projekce vrtu. Tato je získána opět ve tvaru lomené čáry, která je sestavena z projekce úseků vrtu na horizontální rovinu, které mají příslušné azimuty, kde αi, αi+1 jsou azimuty, změřené v sousedních bodech vrtu.
Nejčastěji je prostorová poloha osy vrtu charakterizována jejími projekcemi na dvě, řidčeji na tři roviny. Grafické sestrojení projekce osy vrtu ve dvou či třech rovinách se provádí v pravoúhlých souřadnicích x, y, z.
4 Technické prostředky pro usměrnění křivícího se vrtu
Podle stupně ovlivňování průběhu vrtu technickými nebo technologickými prostředky rozeznáváme čtyři druhy vrtů:
- vrty neovládané, které mají takový průběh, jaký vyjde ze souhrnu geologických, technických a technologických vlivů. Jsou to tedy vrty, v nichž se polohová i silová odchylka kombinuje zcela libovolně.
- vrty ovládané technologicky, na jejichž průběh má vliv použití řádné sestavy spodní části kolony, tj. použití zátěžek, centrátorů apod. Těmito prostředky lze ovlivnit polohu vrtného nástroje, resp. jádrováku ve vrtu podle potřeby. Pro jádrové vrtání se jeví jako nejúčinnější použití jádrováku s úplným vedením, u něhož jsou polohová i silová odchylka rovny nule, a měl by tedy vrtat přímý vrt. Technickým problémem však zůstává vlastní zajištění vhodných vodítek – centrátorů pro jádrovák.
- vrty ovládané režimově, na jejichž průběh má vliv především přítlak. Jeho účinek způsobuje různé polohy spodní části vrtného nářadí ve vrtu, tedy ovlivňuje velikost polohové odchylky. Proto používané hodnoty přítlaku musí odpovídat příslušnému stupni centrace spodní části vrtné kolony.
- vrty ovládané technickými prostředky, jako jsou klíny, můstky, předvrty apod. Tyto prostředky jsou ekonomicky nákladné i technicky náročné a proto by se jich mělo používat jen v případech přesahujících možnosti technologických a režimových prostředků (např. změna směru vrtu, havárie apod.).
4.1 Technické prostředky na usměrnění vrtu při otáčející se vrtné koloně
Obecně se pod usměrněným vrtáním rozumí odchylování od normálního průběhu vrtu. Odklonu takového vrtu se pak dosahuje různými odkloňujícími prostředky, resp. speciálními sestavami vrtné kolony; jsou to:
- odplachovací – popouštěcí dláta,
- trysková (upravená) valivá dláta,
- úhybové klíny v provedení
- standardním,
- s cirkulací výplachu,
- kloubový odchylovač i hydraulický,
- speciální sestavy vrtné kolony.
Odplachovací – popouštěcí dláta
Uplatnění tohoto druhu dlát (obr. 6) bylo jen ve velmi měkkých horninách a tedy u mělkých vrtů a představuje jednu ze starších metod. Jedná se v podstatě o určitou modifikaci excentrického jednolistého dláta, kde rozrušování hornin pomáhá usměrněný výtok výplachu. Během zapouštění byl největší problém dostat dláto do zakřiveného úseku vrtu, usazování dláta bylo prováděno bez kontrolních měření. Později se po zavrtání určitého odkloněného úseku dláto opět vytáhlo.
 Obr. 6: Odplachovací – popouštěcí dláto
Obr. 6: Odplachovací – popouštěcí dláto
Trysková dláta valivá
Využití tryskového účinku kapaliny je další starší, ale stále ještě použitelná metoda aplikované hydrauliky, která má mnohem menší rozsah použitelnosti ve srovnání s používáním úhybových klínů; je velkou mírou závislá na tvrdosti horninových formací. Práce dláta je znázorněna na obr. 7. Nejvhodnější pro tryskovou metodu jsou měkké horniny, naopak nestabilní, nezpevněné horniny erodují značně brzy a to vede nakonec k tvorbě kaveren a způsobuje těžkosti při žádoucí změně směru vrtu.
 Obr. 7: Tryskové valivé dláto
Obr. 7: Tryskové valivé dláto
Úhybové klíny
Úhybové klíny jsou obecně dvojího druhu a sice
- standardní,
- s cirkulací výplachu.
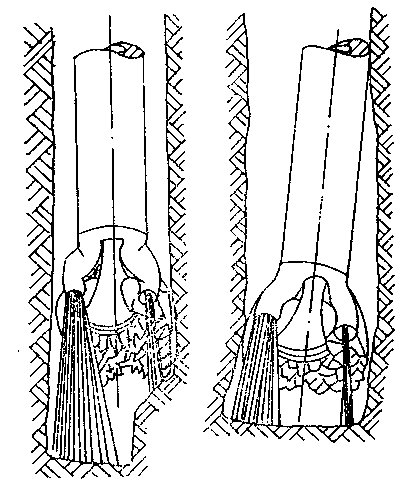
V podstatě zůstala i s postupným zdokonalováním úhybových klínů původní funkce zachována. Nastalo postupně vylepšování oplachování břitu samotného klínu, rozdíl úhybových klínů a stupeň modernizace jsou patrny z obr. 8.
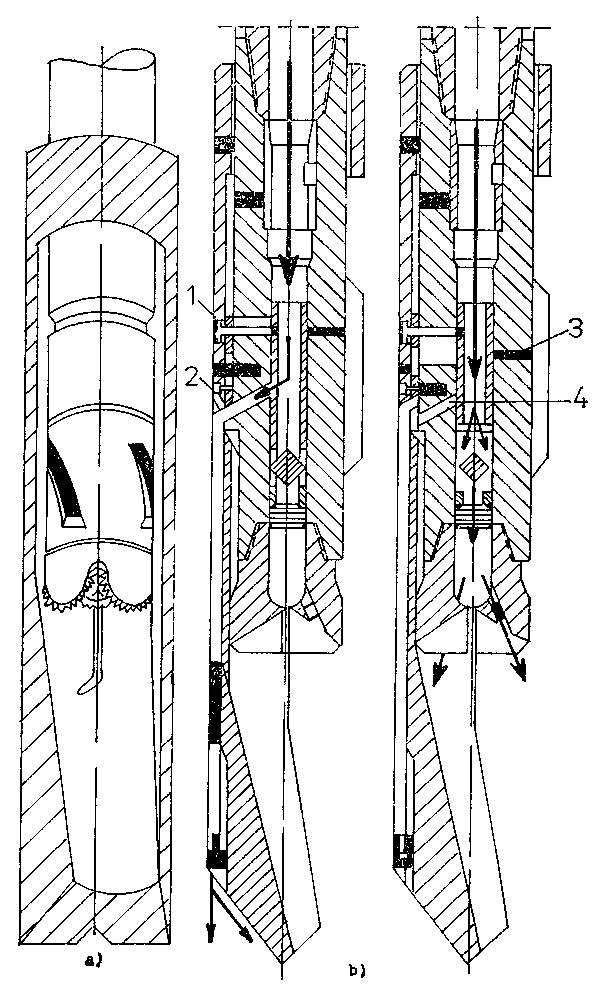 Obr. 8: Typy úhybových klínů (fa. Eastman)
Obr. 8: Typy úhybových klínů (fa. Eastman)a – standardní, b – s cirkulací výplachu;
1 – střižný kolík, 2 – obtokový ventil otevřen, 3 – střižný kolík oddělen,4 – obtokový ventil uzavřen
Úhybové klíny lze také dělit na tzv. zapuštěné na ztraceno, neorientovaně, které zůstávají natrvalo ve vrtu, resp. těžitelné, které lze po příslušném náboru úhlu křivosti a odvrtání určité délky vrtu (6 – 9 m) opět vytáhnout. S úhybovými klíny se pracuje podle konkrétních podmínek a požadavků jak v nezapažené části vrtu, tak i v zapaženém úseku vrtu při speciálních haváriích, resp. z důvodů těžebních apod., kde je zpravidla skrz pažnici vyfrézováno okno a hlouben nový úsek vrtu.
Provedení úhybového klínu je tak uzpůsobeno, že jeho spodní konec vybíhá v ostrý hrot, kterým je klín zatláčen do počvy vrtu, resp. cementového mostku. Horní konec klínu je upraven do tvaru objímky, kterou pak prochází vrtná trubka s připojeným dlátem, a to šnekovým pro horniny měkké, dále valivým a diamantovým pro horniny tvrdé až velmi tvrdé. Vrchní připojovací část nebo dolní přechod dláta mají větší průměr než vnitřní průměr objímky klínu, takže je při jeho zapouštění nebo tažení zavěšena na dlátu. Objímka klínu je s dlátem spojena jedním nebo dvěma střižnými kolíky, čímž při zapouštění zůstává úhybový klín s vrtnou tyčí spojen ve stejné rovině (úhlu).
K docílení různých odklonů vrtů se používá jednak klínů s různě nakloněným neboli šikmým úkosem v rozmezí 2 ½ ° až 4 ½ ° a v jednotlivých fázích se volí rozdílná sestava vrtné kolony a úhybových prostředků.
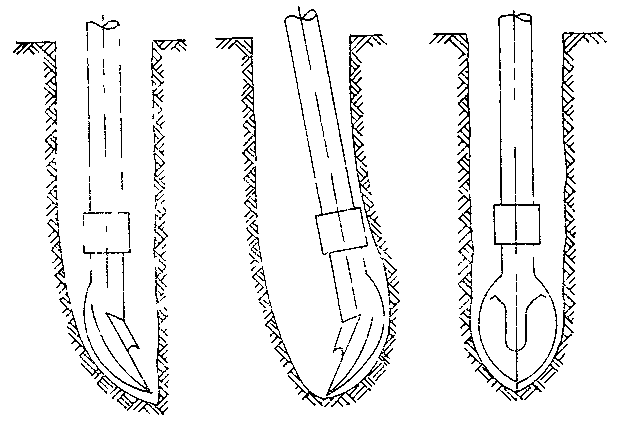
Princip práce s úhybovým klínem a její jednotlivé fáze při křivení vrtu jsou znázorněny na obr. 9 (fáze 1 – 4):
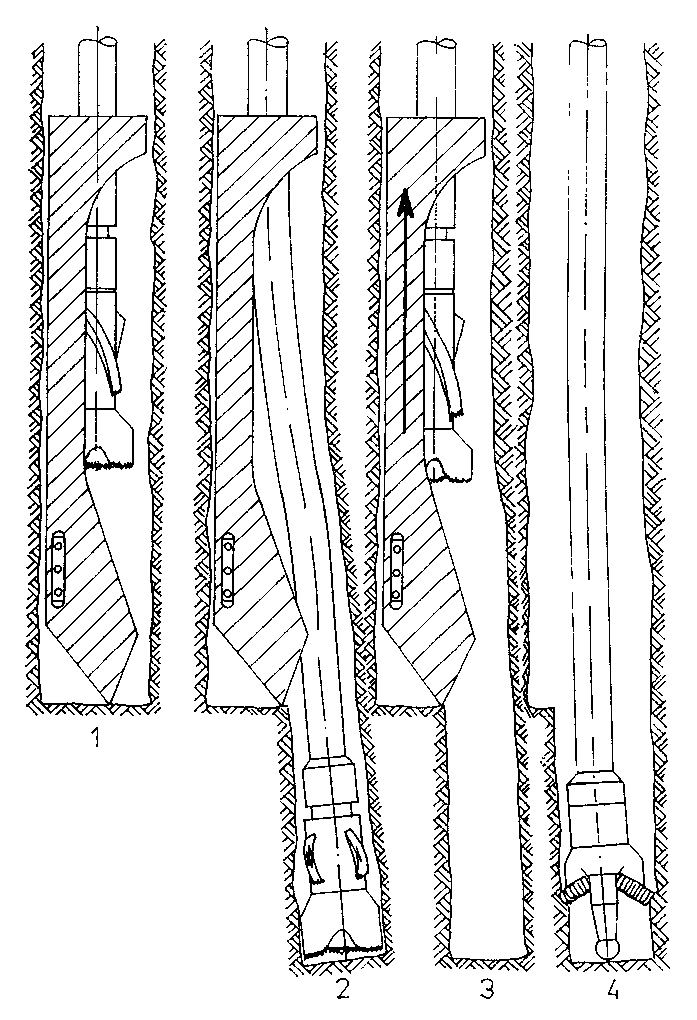 Obr. 9: Pracovní fáze s úhybovým klínem
Obr. 9: Pracovní fáze s úhybovým klínem
- Úhybový klín se pomocí střižného kolíku upevní k vrtnému nástroji a usadí na počvu vrtu ve stanoveném směru, přičemž dojde k ustřižení kolíku.
- Pak se vrtá podél úhybového klínu, přičemž nový stvol vrtu zásluhou úkosu úhybového klínu nabírá křivost. Zpravidla se záběr délky hloubení pohybuje až 5 m pod úhybový klín.
- Následně se úhybový klín z vrtu vytáhne. Objímka je na vrchním konci úhybového klínu s menším vnitřním průměrem než vnější průměr vrtného nástroje, umožňuje vytažení úhybového klínu.
- Posléze se předvrtaný stvol rozšíří pilotovým dlátem (rozšiřovačem) na nominální průměr. Tato fáze odpadá, je-li přímo úhyb zavrtáván nominálním průměrem dláta.
Z obr. 9 je patrné, že má úhybový klín pod objímkou dost dlouhou přímou plochu, která umožňuje sestavit účelnou kombinaci elementů vrtné kolony.
Osvědčily se následující sestavy:
- k docílení úhlu odklonu vrtu kolem 2° se podél klínu vrtá jen dlátem,
- k docílení úhlu odklonu vrtu 2° – 4° je vhodné použít dláto se stabilizátorem,
- k docílení úhlu odklonu vrtu kolem 4° – 6° se doporučuje použít dláto, stabilizátor a kloubový spojník, čili určitou smíšenou sestavu, pro podporu a udržení úhlu křivosti.
Např. společnost Eastman produkuje úhybové klíny o průměru 11″ (280 mm) pro průměr dláta 9 5/8″ (244,5 mm) a průměr vrtu 11 ¾ ″ až 14 ¾ ″ (298 – 374 mm) při použití stabilizátoru s kloubovým spojem o průměru 249 mm (9 13/16 ″) a délce klínu 4,20 m.
Kloubový odchylovač (obr. 10) je univerzálnější než úhybový klín a užívá se převážně pro středně tvrdé horniny a přednostně při náboru křivosti vrtu z cementového mostku. Pružinový kloubový odchylovač sestává z kloubového spojníku, rozšiřovače (listového nebo válečkového) a pilotového dláta (obr. 11). Odkloňující účinek je vyvoláván silnou pružinou, která tlačí zkosenou objímku proti horní části kloubu, a tím udržuje spodní část odchylovače v šikmé poloze. Otáčení vrtných tyčí se přenáší unášecím svorníkem z vrchní na spodní část odchylovače.
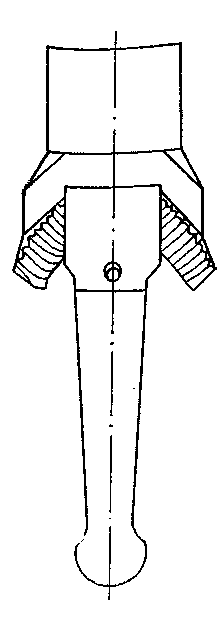 Obr. 11: Válečkové pilotové dláto
Obr. 11: Válečkové pilotové dláto
Na obr. 12 jsou uvedeny fáze (1 – 4) náboru křivosti pomocí kloubového odchylovače:
- Celá sestava vrtného nářadí je orientovaně usazena na počvu vrtu.
- Zavrtávání stvolu vrtu s vyjmenovanou sestavou vrtného nářadí, tj. včetně rozšiřovače a pilotového dláta.
- Dokončení závrtu nového stvolu vrtu, tj. cca 6 m.
- Rozšíření nového stvolu vrtu pomocí pilotového dláta.
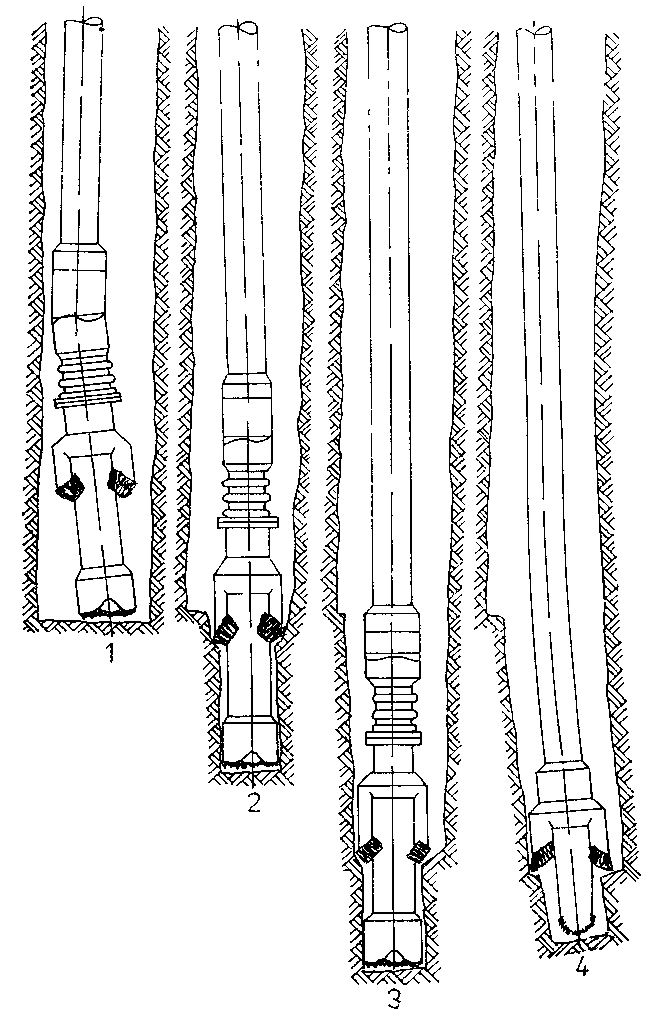 Obr. 12: Pracovní fáze s kloubovým odchylovačem
Obr. 12: Pracovní fáze s kloubovým odchylovačem
Orientování odchylovače (i úhybového klínu) do požadovaného směru před jeho usazením na počvě vrtu se při rotačním vrtání provádí v podstatě dvěma způsoby:
- Orientováním odchylovače na povrchu, kdy je tento pevně spojen s vrtnými trubkami a orientovaně zapouštěn, čili orientace z povrchu neboli z vrtné soupravy.
- Orientováním odchylovače na počvě vrtu po jeho zapuštění na vrtných trubkách.
4.2 Technické prostředky na usměrnění vrtu s přímým pohonem dláta
Usměrněné vrtání s ponorným motorem je založené na použití takové sestavy spodní části vrtné kolony, která by na dláto vyvolávala stále působící odkloňující sílu ve vyžadovaném směru. Pro její vznik se ve spodní části kolony používají různé odchylovací prostředky, hlavně však křivý přechodník a turbinový odchylovač, ve kterém křivý přechodník tvoří součást celého zařízení. Výhody použití křivého přechodníku jsou hlavně v jednoduchosti, možnosti přesného směrování, v použití stejného průměru úhybu jako v přímé části vrtu a s tím spojenou nižší časovou náročností, ve snížení opotřebení kolony a dalším. Nejjednodušší křivé přechodníky se vyrábějí jako pevné s tím, jejich jedna čepová část je vyosená od 0,5° do 2,5° s krokem odchylovacího úhlu 0,5°. Na horní čep se připojí nemagnetická zátěžka, na spodní čep ponorným motor. Nevýhodou pevných křivých i nastavitelných přechodníků jen na povrchu je ztížené a pomalé zapouštění a omezení vychylovacího úhlu mezerou mezi průměrem vrtu motoru a zátěžek, tak i délka ponorného motoru.
Křivý přechodník nastavený krutem (Twist – Kick Bent Sub) je složený ze dvou částí oddělených plochou, která je skloněná o určitý úhel k ose nástroje. Vzájemným pootočením obou částí krouticím momentem ponorného motoru se vychýlí spodní díl do hodnoty nastaveného úhlu. Tento konstrukční princip se používá u různých křivých přechodníků různých společností.
Křivý kloubový přechodník (Dyna – Flex – Joint). Přechodník se ovládá z povrchu kalibrovanou tyčí zapouštěnou do vrtné kolony na lanku. Tyč uzavře průtokový kanál pístu a vzniklý tlak zatlačí píst na vačku a přes ni na páku vychylovací části přichycenou v kulovém kloubu. Výměnný zajišťovací klín zaručuje zvolenou úhlovou odchylku.
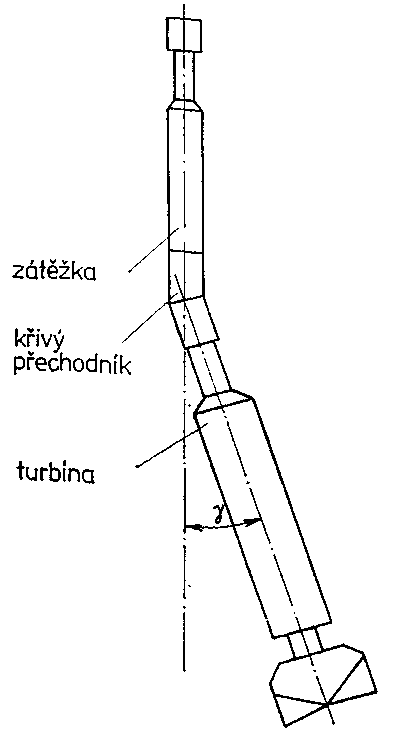 Obr. 13: Křivý přechodník
Obr. 13: Křivý přechodník